
Publications
| Robometer: Scaling General-Purpose Robotic Reward Models via Trajectory Comparisons Anthony Liang*, Yigit Korkmaz*, Jiahui Zhang, Minyoung Hwang, Abrar Anwar, Sidhant Kaushik, Aditya Shah, Alex S. Huang, Luke Zettlemoyer, Dieter Fox, Yu Xiang, Anqi Li, Andreea Bobu, Abhishek Gupta, Stephen Tu†, Erdem Bıyık†, Jesse Zhang† Proceedings of Robotics: Science and Systems (RSS), July 2026 * denotes equal contribution. † denotes equal advising. |
 |
| Judgelight: Trajectory-Level Post-Optimization for Multi-Agent Path Finding via Closed-Subwalk Collapsing Yimin Tang, Sven Koenig, Erdem Bıyık Proceedings of the 17th World Symposium on Algorithmic Foundations of Robotics (WAFR), June 2026 |
 |
| Vibrotactile Preference Learning: Uncertainty-Aware Preference Learning for Personalized Vibration Feedback Rongtao Zhang*, Xin Zhu*, Masoume Pourebadi Khotbehsara, Warren Dao, Erdem Bıyık, Heather Culbertson 34th ACM International Conference on User Modeling, Adaptation and Personalization (UMAP), June 2026 * denotes equal contribution. |
 |
| ORIC: Benchmarking Object Recognition under Contextual Incongruity in Large Vision-Language Models Zhaoyang Li, Zhan Ling, Yuchen Zhou, Litian Gong, Erdem Bıyık, Hao Su IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2026 |
 |
| AutoFocus-IL: VLM-based Saliency Maps for Data-Efficient Visual Imitation Learning without Extra Human Annotations Litian Gong, Fatemeh Bahrani, Yutai Zhou, Amin Banayeeanzade, Jiachen Li, Erdem Bıyık International Conference on Robotics and Automation (ICRA), June 2026 |
 |
| HAND Me the Data: Fast Robot Adaptation via Hand Path Retrieval Matthew Hong*, Anthony Liang*, Kevin Kim, Harshitha Rajaprakash, Jesse Thomason†, Erdem Bıyık†, Jesse Zhang† International Conference on Robotics and Automation (ICRA), June 2026 * denotes equal contribution. † denotes equal advising. |
 |
| IMPACT: Intelligent Motion Planning with Acceptable Contact Trajectories via Vision-Language Models Yiyang Ling*, Karan Owalekar*, Oluwatobiloba Adesanya, Erdem Bıyık, Daniel Seita International Conference on Robotics and Automation (ICRA), June 2026 * denotes equal contribution. |
 |
| PEEK: Guiding and Minimal Image Representations for Zero-Shot Generalization of Robot Manipulation Policies Jesse Zhang*, Marius Memmel*, Kevin Kim, Dieter Fox, Jesse Thomason, Fabio Ramos, Erdem Bıyık, Abhishek Gupta†, Anqi Li† International Conference on Robotics and Automation (ICRA), June 2026 * denotes equal contribution. † denotes equal advising. |
 |
| Data-efficient Robot Learning using Natural Human Guidance Anthony Liang CS Department, University of Southern California, June 2026 Ph.D. Dissertation |
 |
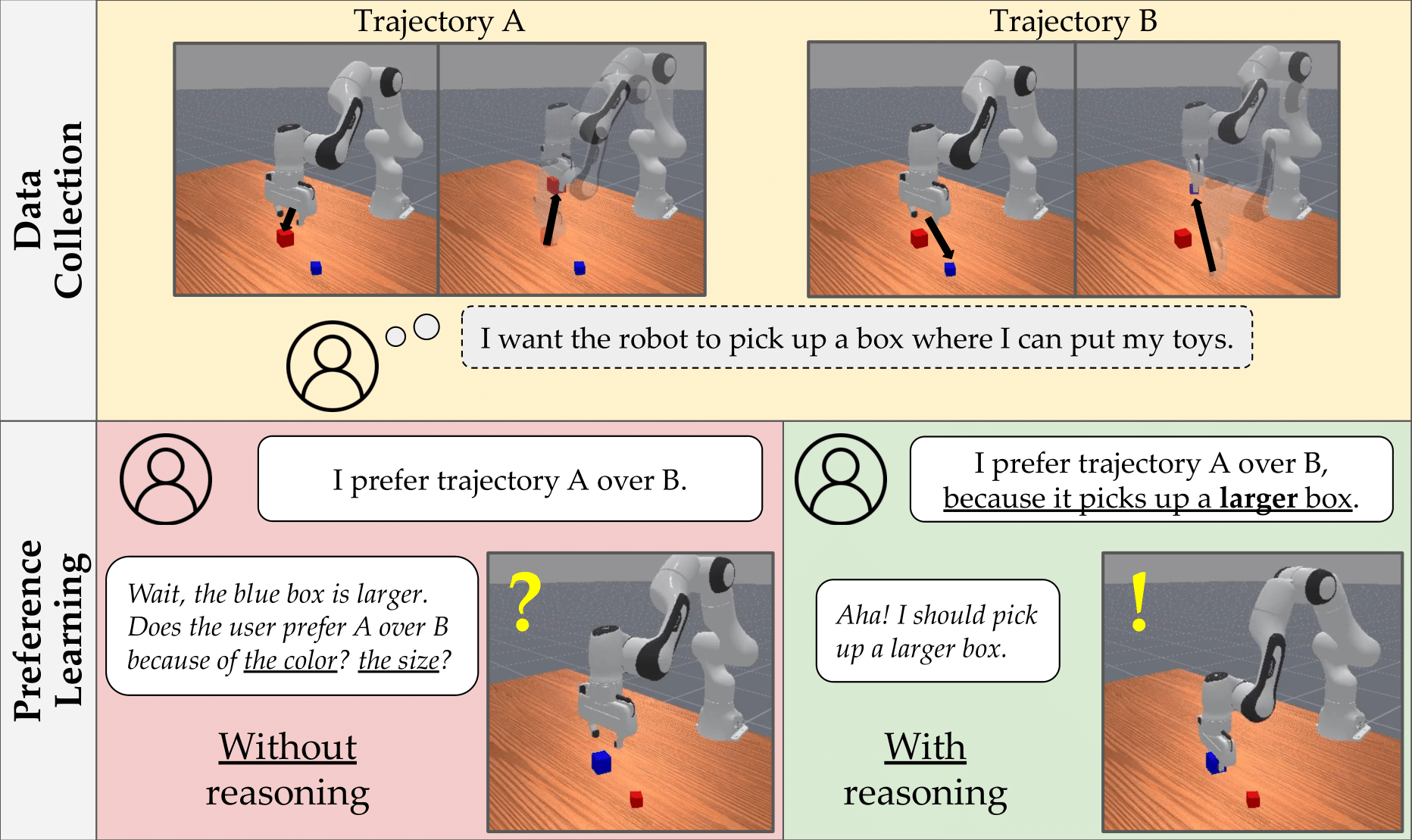
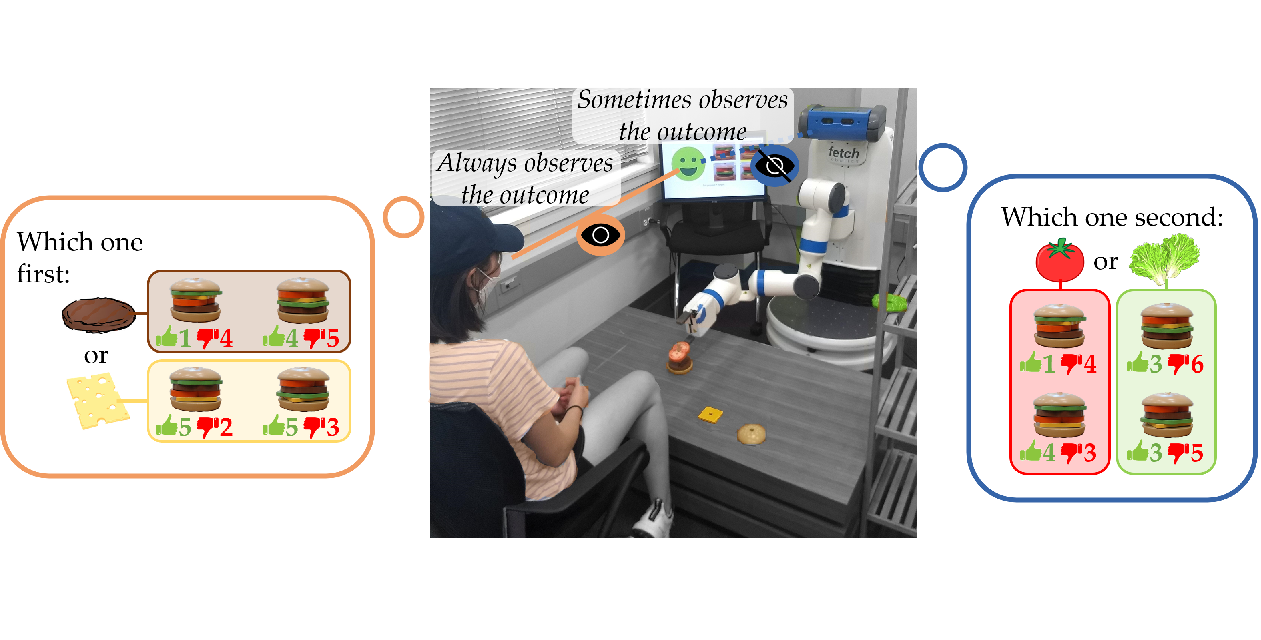
| Causally Robust Reward Learning from Reason-Augmented Preference Feedback Minjune Hwang, Yigit Korkmaz, Daniel Seita†, Erdem Bıyık† International Conference on Learning Representations (ICLR), April 2026 † denotes equal advising. Also presented at RSS 2025 Workshop on Human-in-the-Loop Robot Learning and Workshop on Continual Robot Learning from Humans, June 2025 (PDF). |
 |
| When a Robot is More Capable than a Human: Learning from Constrained Demonstrators Xinhu Li, Ayush Jain, Zhaojing Yang, Yigit Korkmaz, Erdem Bıyık International Conference on Learning Representations (ICLR), April 2026 |
 |
| Value Explicit Pretraining for Learning Transferable Representations Kiran Lekkala, Henghui Bao, Sumedh A. Sontakke, Erdem Bıyık, Laurent Itti IEEE Robotics and Automation Letters (RA-L), 2026 |
 |
| SyncTwin: Fast Digital Twin Construction and Synchronization for Safe Robotic Grasping Ruopeng Huang, Boyu Yang, Wenlong Gui, Jeremy Morgan, Erdem Bıyık, Jiachen Li arXiv preprint, January 2026 |
 |
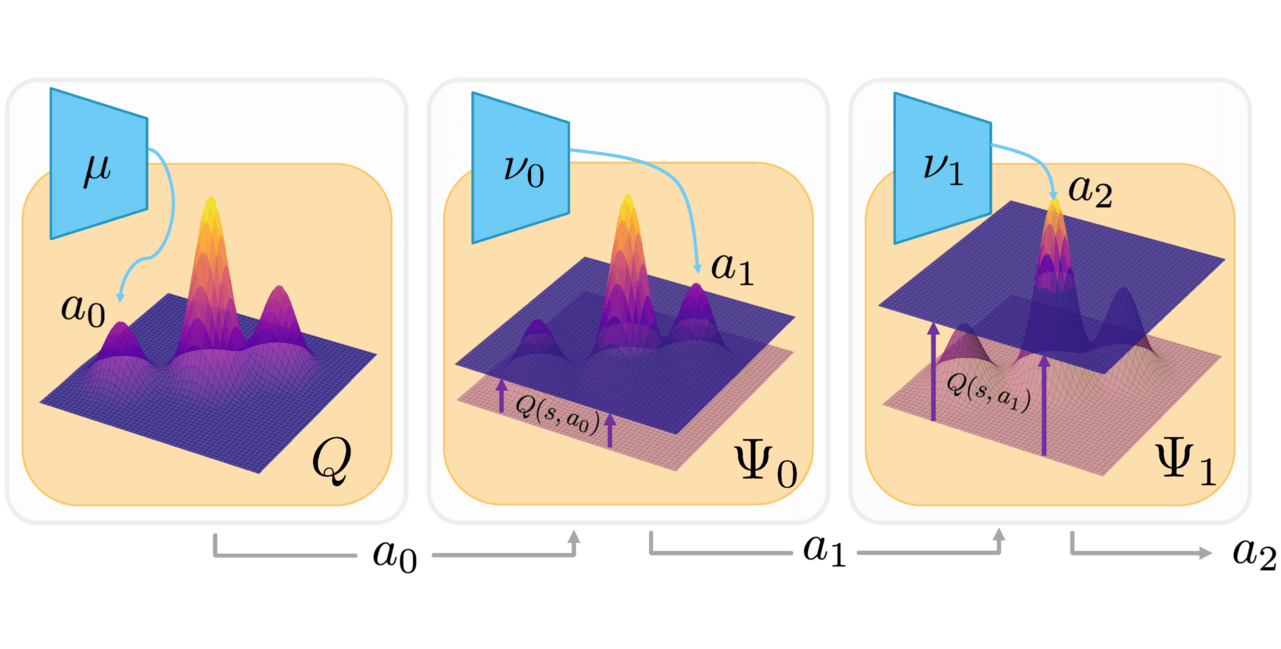
| Actor-Free Continuous Control via Structurally Maximizable Q-Functions Yigit Korkmaz*, Urvi Bhuwania*, Ayush Jain†, Erdem Bıyık† Conference on Neural Information Processing Systems (NeurIPS), December 2025 * denotes equal contribution. † denotes equal advising. |
 |
| Human-Interactive Robot Learning: Definition, Challenges, and Recommendations Kim Baraka, Ifrah Idrees, et al. ACM Transactions on Human-Robot Interaction (THRI), 2025 |
 |
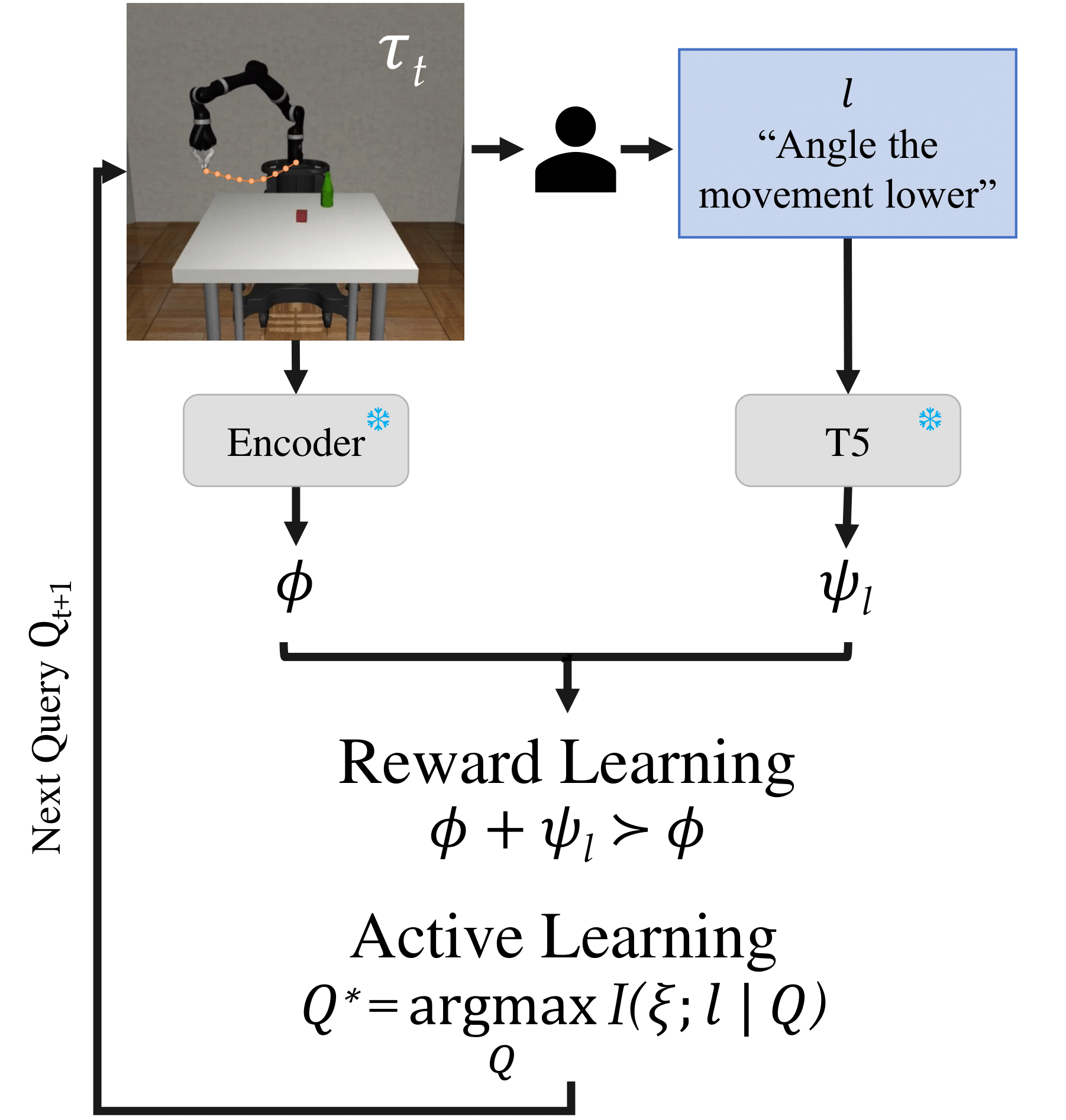
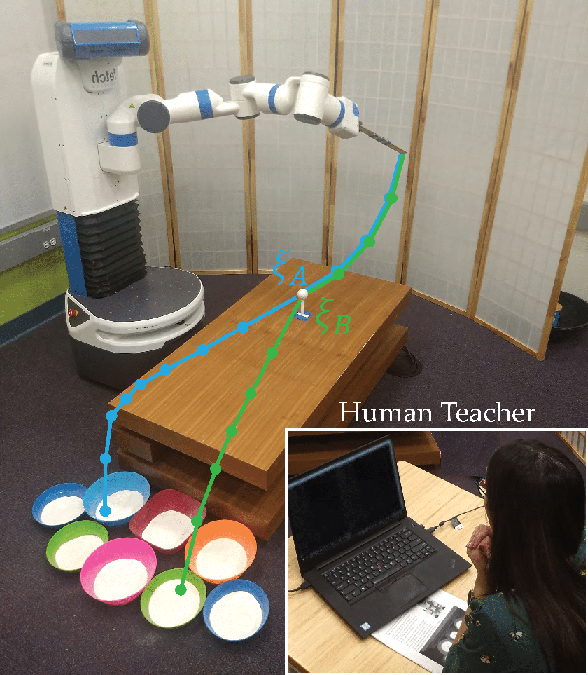
| Active Reward Learning and Iterative Trajectory Improvement from Comparative Language Feedback Eisuke Hirota*, Zhaojing Yang*, Ayano Hiranaka, Miru Jun, Jeremy Tien, Stuart J. Russell, Anca Dragan, Erdem Bıyık International Journal of Robotics Research (IJRR), 2025 * denotes equal contribution. |
 |
| Training Robots with Natural and Lightweight Human Feedback Erdem Bıyık AI Magazine, 2025 |
 |
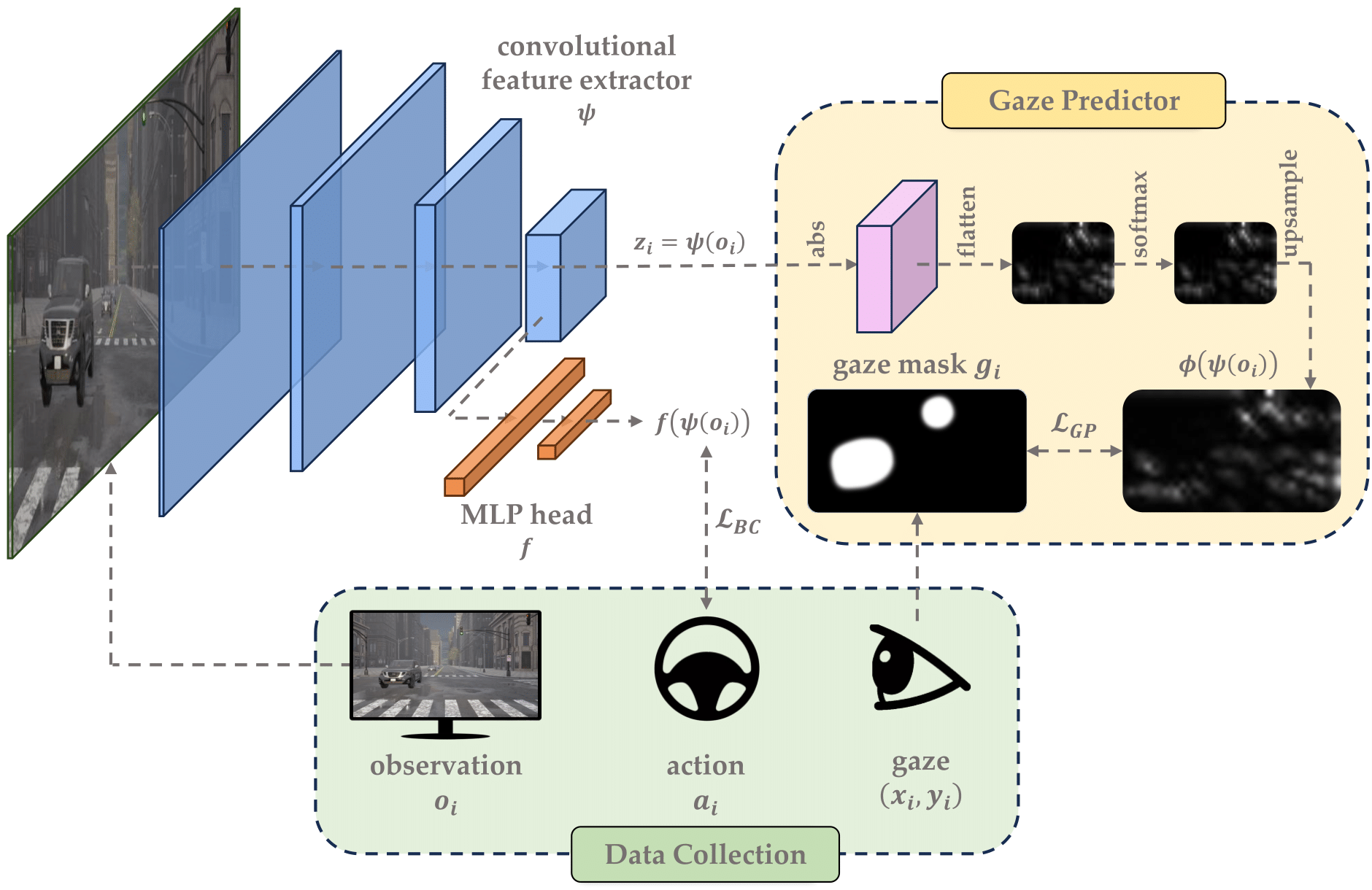
| GABRIL: Gaze-Based Regularization for Mitigating Causal Confusion in Imitation Learning Amin Banayeeanzade*, Fatemeh Bahrani*, Yutai Zhou, Erdem Bıyık International Conference on Intelligent Robots and Systems (IROS), October 2025 * denotes equal contribution. |
 |
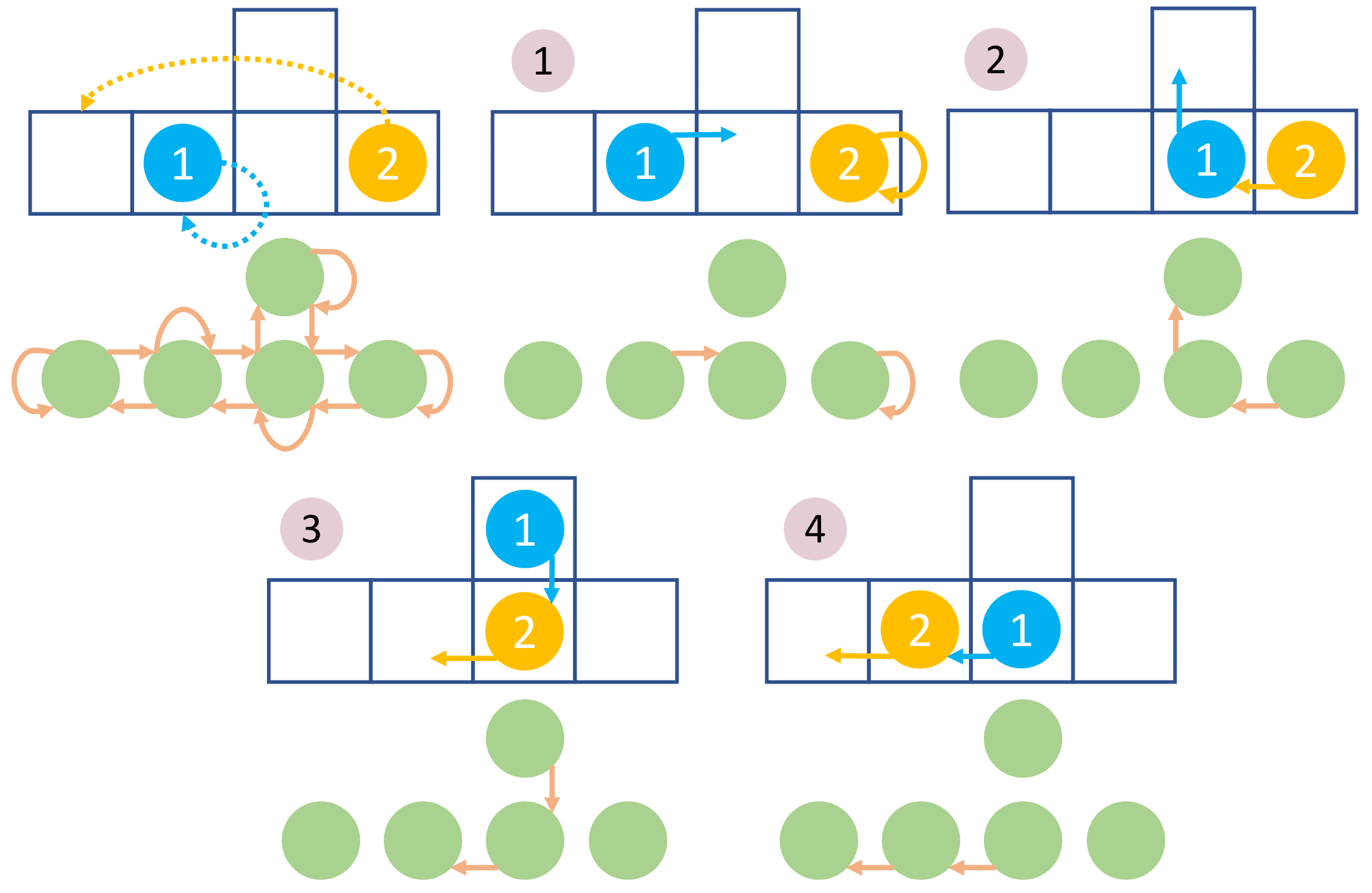
| RAILGUN: A Unified Convolutional Policy for Multi-Agent Path Finding Across Different Environments and Tasks Yimin Tang*, Xiao Xiong*, Jingyi Xi, Jiaoyang Li, Erdem Bıyık, Sven Koenig International Conference on Intelligent Robots and Systems (IROS), October 2025 * denotes equal contribution. |
 |
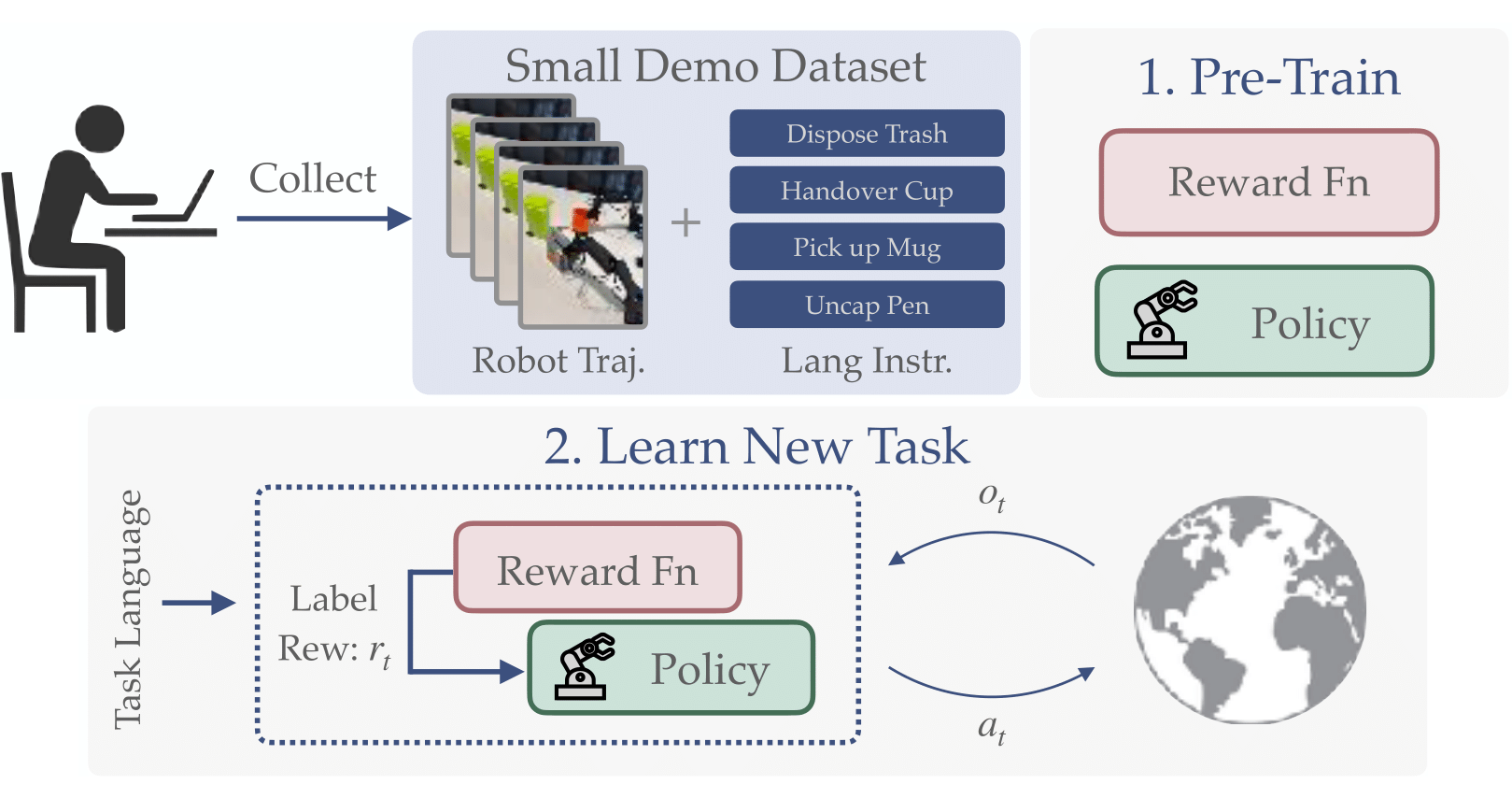
| ReWiND: Language-Guided Rewards Teach Robot Policies without New Demonstrations Jiahui Zhang*, Yusen Luo*, Abrar Anwar*, Sumedh A. Sontakke, Joseph J. Lim, Jesse Thomason, Erdem Bıyık, Jesse Zhang Proceedings of the 9th Conference on Robot Learning (CoRL), September 2025 * denotes equal contribution. Also presented at various workshops at RSS 2025 and RLC 2025. Oral presentation. Also received the best paper award at the OOD workshop and a best paper nomination at RoboReps Workshop at RSS 2025. |
 |
| Mitigating Suboptimality of Deterministic Policy Gradients in Complex Q-functions Ayush Jain, Norio Kosaka, Xinhu Li, Kyung-Min Kim, Erdem Bıyık, Joseph J. Lim 2nd Reinforcement Learning Conference (RLC), August 2025 Outstanding Paper Award on Empirical Reinforcement Learning Research. |
 |
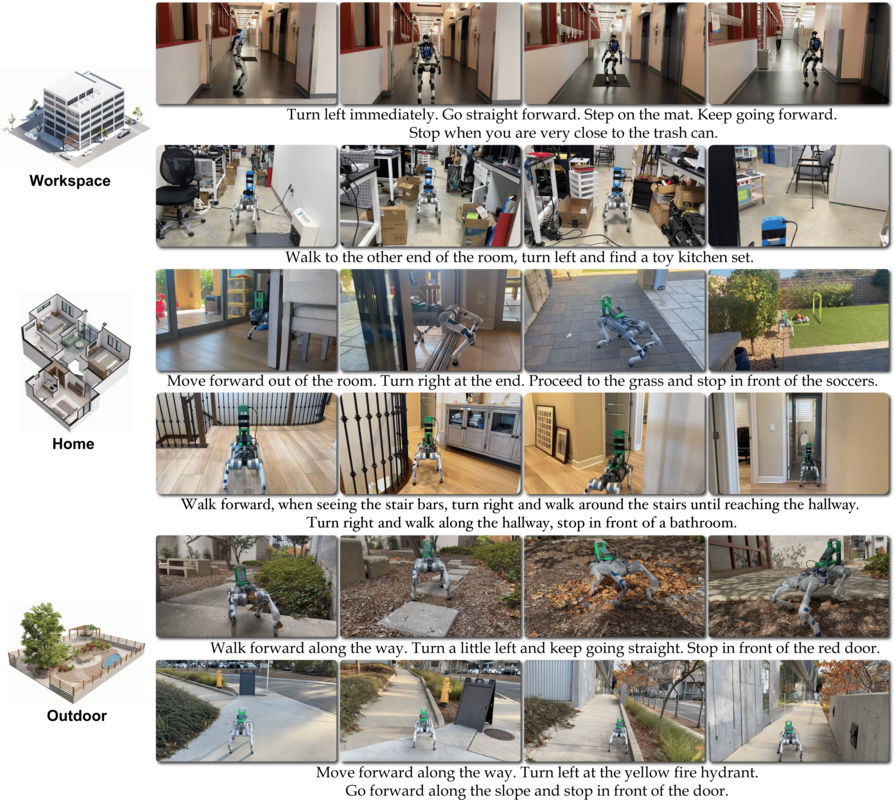
| NaVILA: Legged Robot Vision-Language-Action Model for Navigation An-Chieh Cheng*, Yandong Ji*, Zhaojing Yang*, Xueyan Zou, Jan Kautz, Erdem Bıyık, Hongxu Yin, Sifei Liu, Xiaolong Wang Proceedings of Robotics: Science and Systems (RSS), June 2025 * denotes equal contribution. |
 |
| Improving Reward Learning by Estimating Annotator Expertise Pavel Czempin, Rachel Freedman, Ellen Novoseller, Vernon Lawhern, Cameron Allen, Erdem Bıyık RSS 2025 Workshop on Continual Robot Learning from Humans, June 2025 |
 |
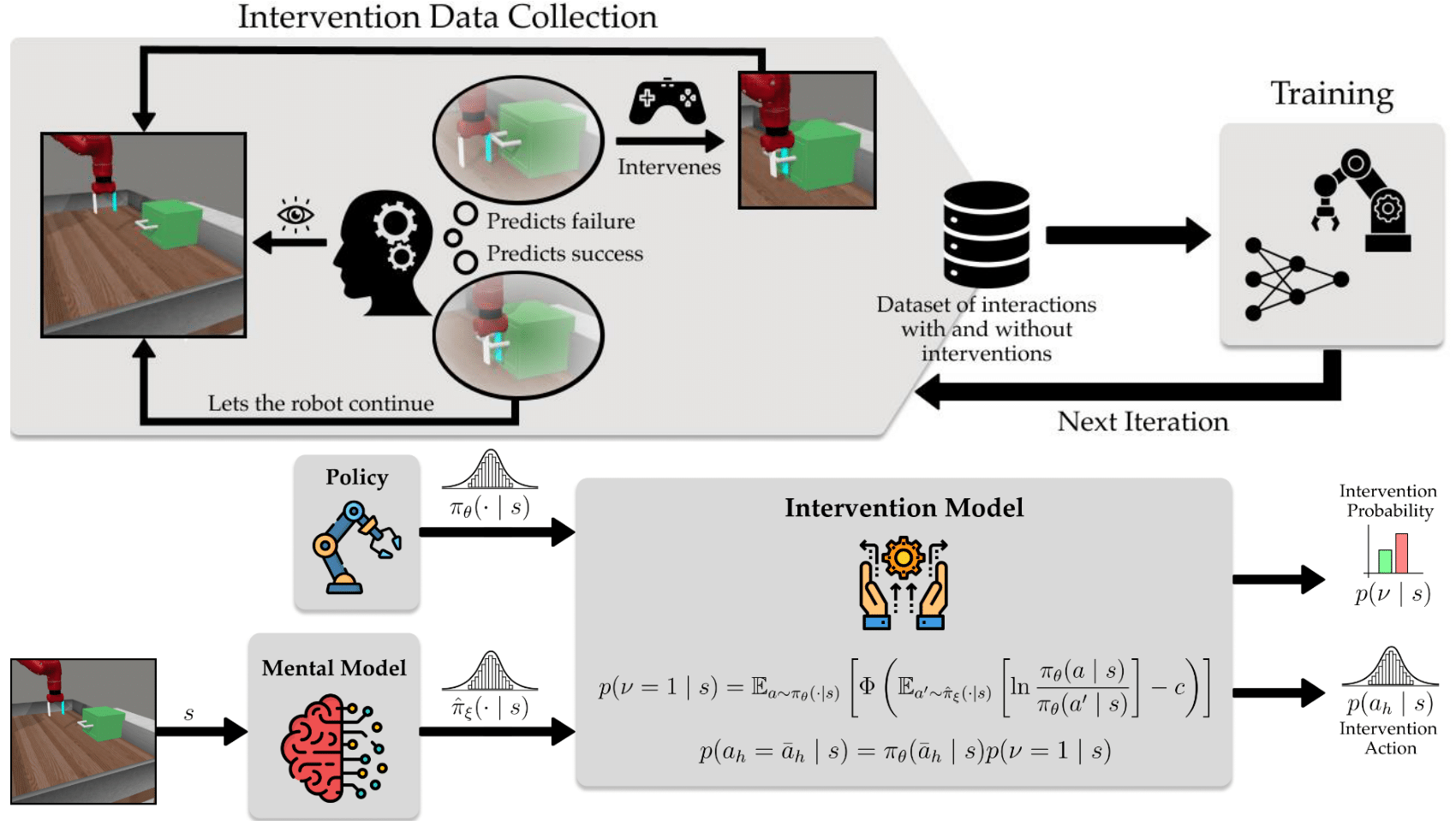
| MILE: Model-based Intervention Learning Yigit Korkmaz, Erdem Bıyık International Conference on Robotics and Automation (ICRA), May 2025 |
 |
| Multi-Agent Inverse Q-Learning from Demonstrations Nathaniel Haynam, Adam Khoja, Dhruv Kumar, Vivek Myers, Erdem Bıyık International Conference on Robotics and Automation (ICRA), May 2025 |
 |
| Scaling Robot Adaptation with Large Model Guidance Jesse Zhang CS Department, University of Southern California, June 2025 Ph.D. Dissertation |
 |
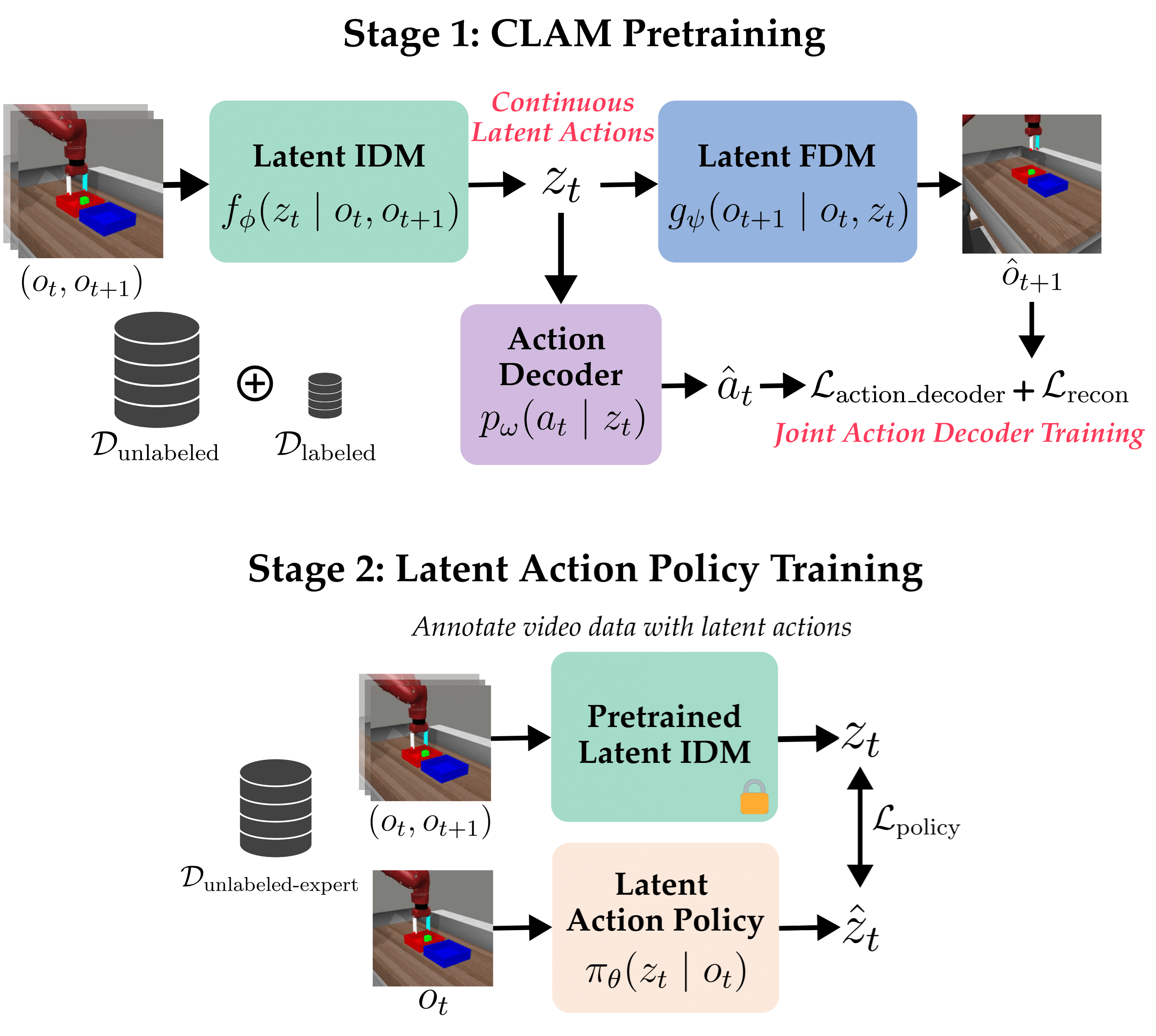
| CLAM: Continuous Latent Action Models for Robot Learning from Unlabeled Demonstrations Anthony Liang*, Pavel Czempin*, Matthew Hong, Yutai Zhou, Erdem Bıyık†, Stephen Tu† arXiv preprint, May 2025 * denotes equal contribution. † denotes equal advising. |
 |
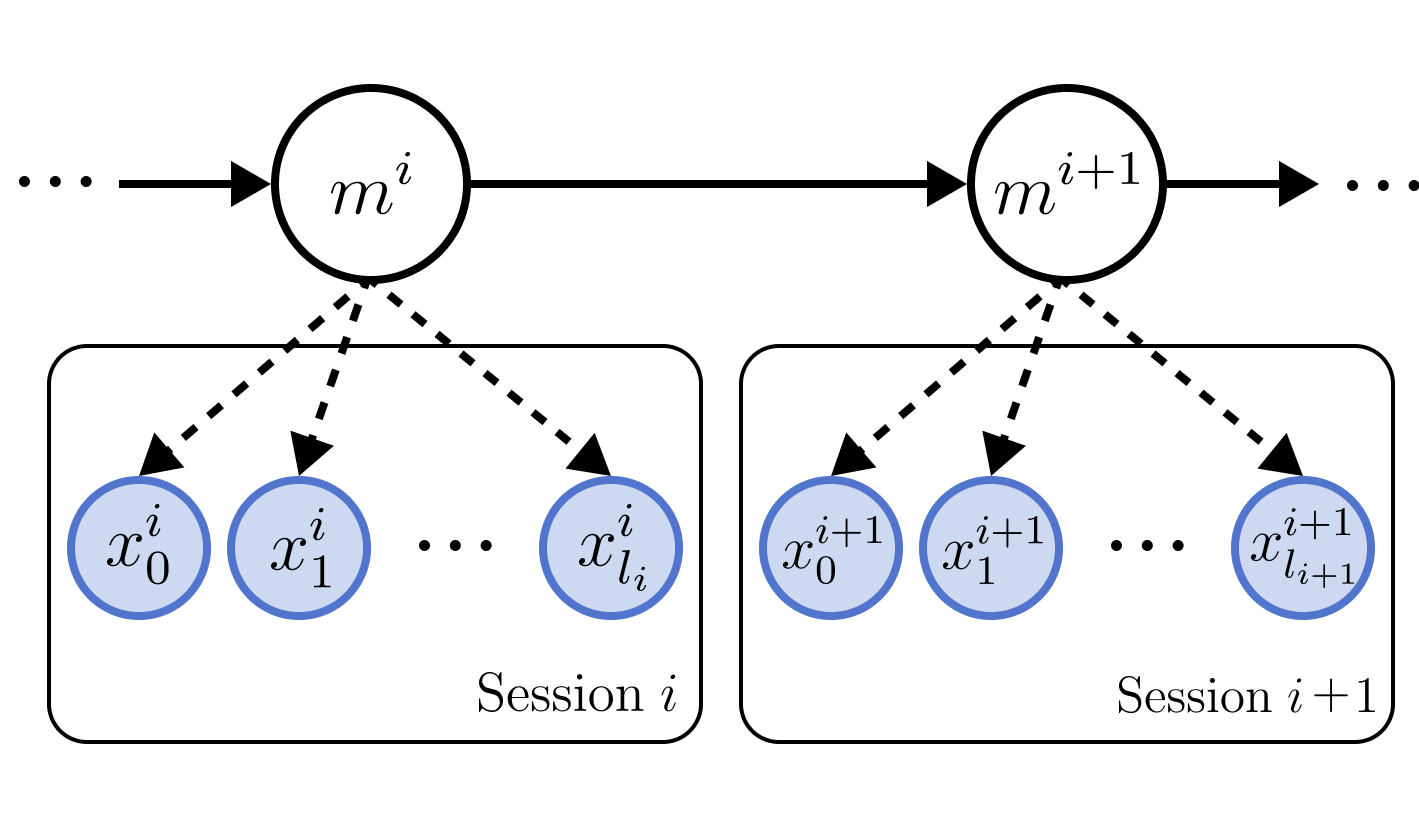
| DynaMITE-RL: A Dynamic Model for Improved Temporal Meta-Reinforcement Learning Anthony Liang, Guy Tennenholtz, Chih-wei Hsu, Yinlam Chow, Erdem Bıyık, Craig Boutilier Conference on Neural Information Processing Systems (NeurIPS), December 2024 |
 |
| Decision Making in Complex Action Spaces Ayush Jain CS Department, University of Southern California, December 2024 Ph.D. Dissertation |
 |
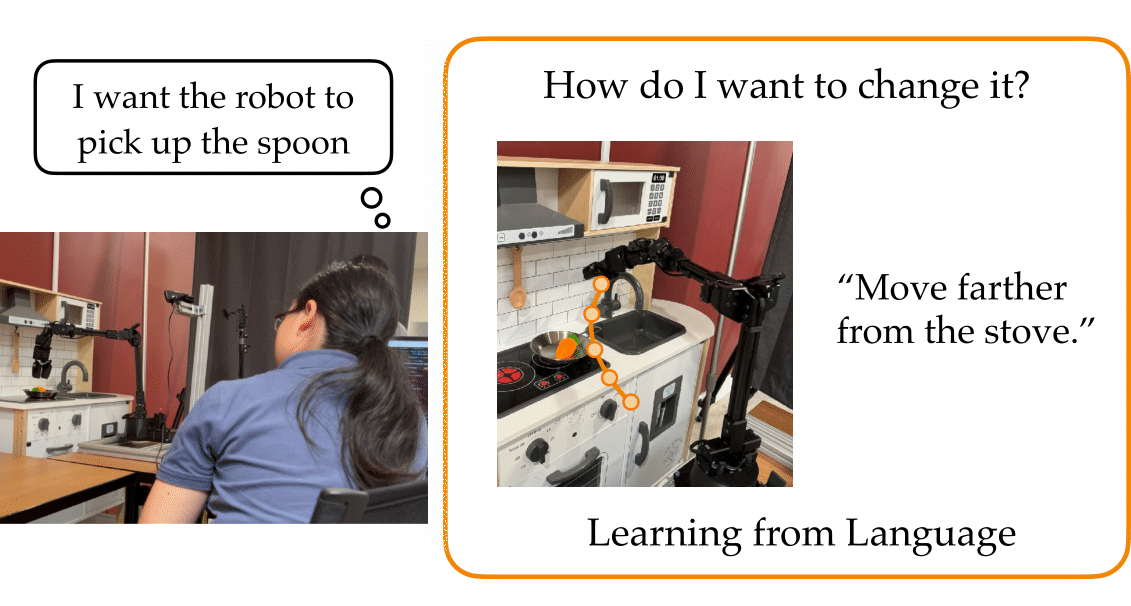
| Trajectory Improvement and Reward Learning from Comparative Language Feedback Zhaojing Yang, Miru Jun, Jeremy Tien, Stuart J. Russell, Anca Dragan, Erdem Bıyık Proceedings of the 8th Conference on Robot Learning (CoRL), November 2024 Also presented at HRI Human-Interactive Robot Learning Workshop, March 2024 (PDF). |
 |
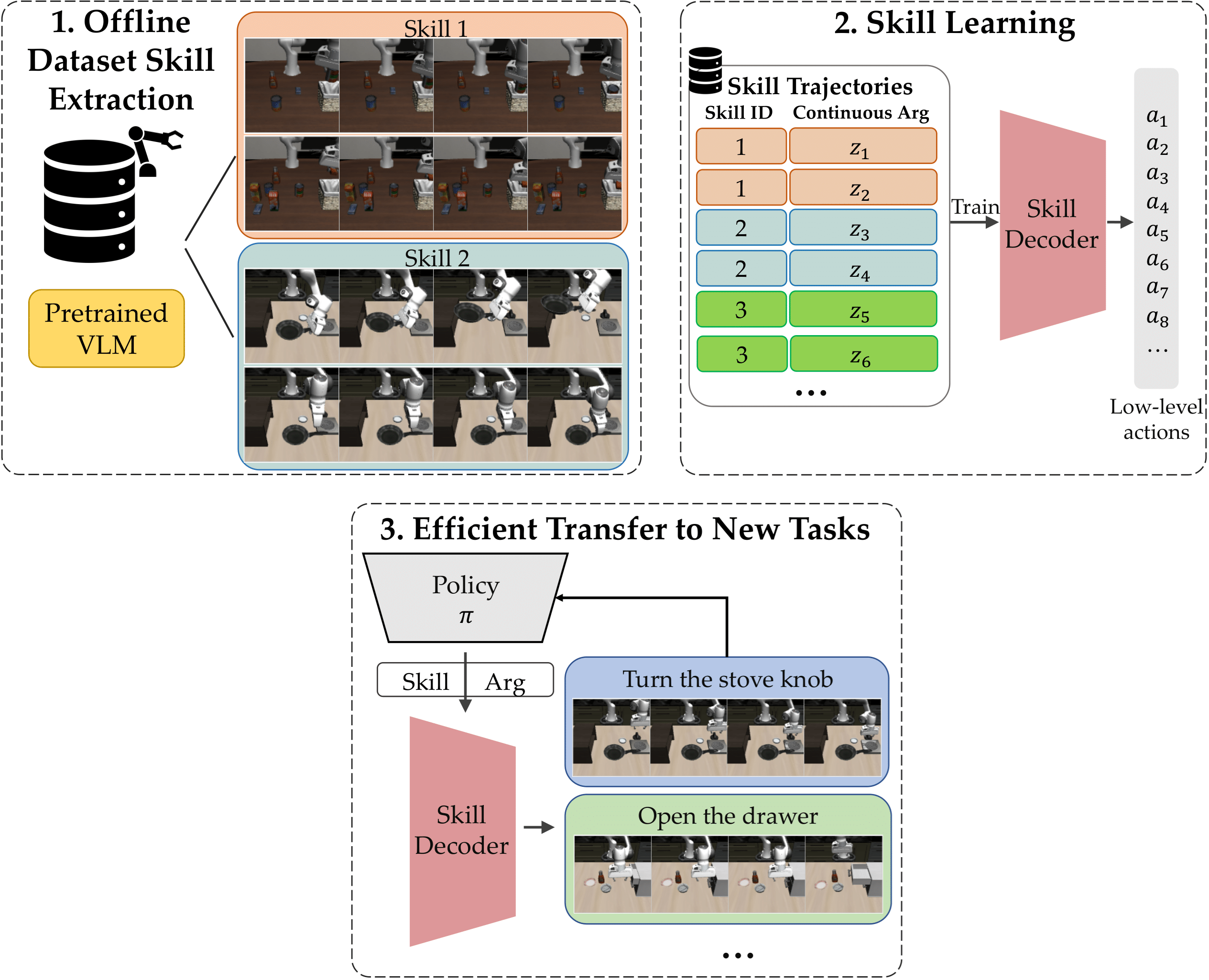
| EXTRACT: Efficient Policy Learning by Extracting Transferable Robot Skills from Offline Data Jesse Zhang, Minho Heo, Zuxin Liu, Erdem Bıyık, Joseph J Lim, Yao Liu, Rasool Fakoor Proceedings of the 8th Conference on Robot Learning (CoRL), November 2024 |
 |
| Accurate and Data-Efficient Toxicity Prediction when Annotators Disagree Harbani Jaggi*, Kashyap Murali*, Eve Fleisig, Erdem Bıyık Conference on Empirical Methods in Natural Language Processing (EMNLP), November 2024 * denotes equal contribution. |
|
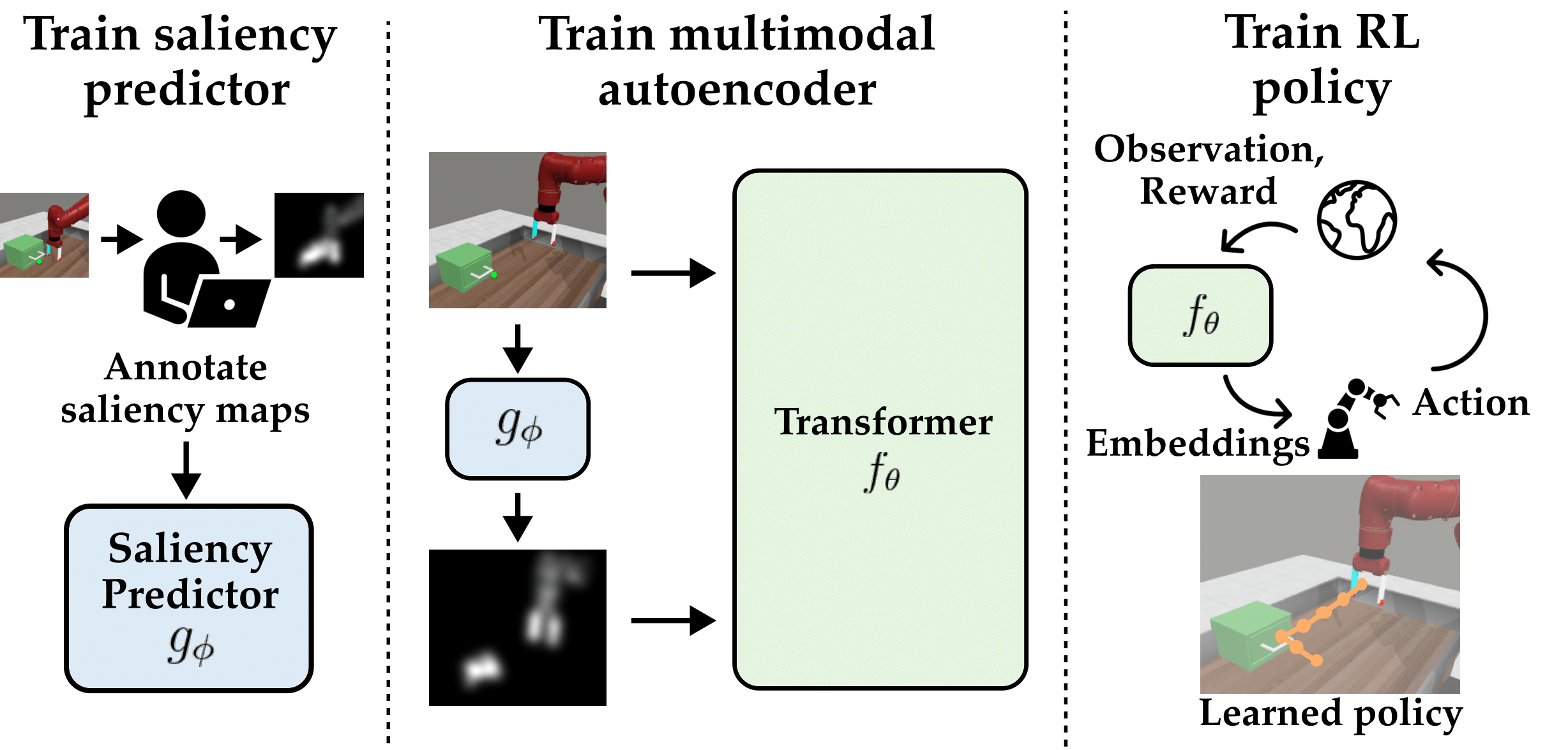
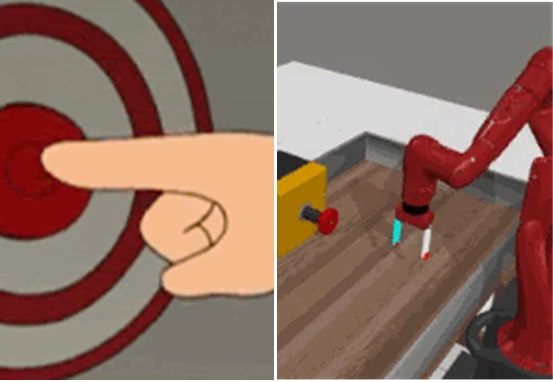
| ViSaRL: Visual Reinforcement Learning Guided by Human Saliency Anthony Liang, Jesse Thomason, Erdem Bıyık International Conference on Intelligent Robots and Systems (IROS), October 2024 Also presented at ICRA Pretraining for Robotics Workshop, May 2023 (PDF). |
 |
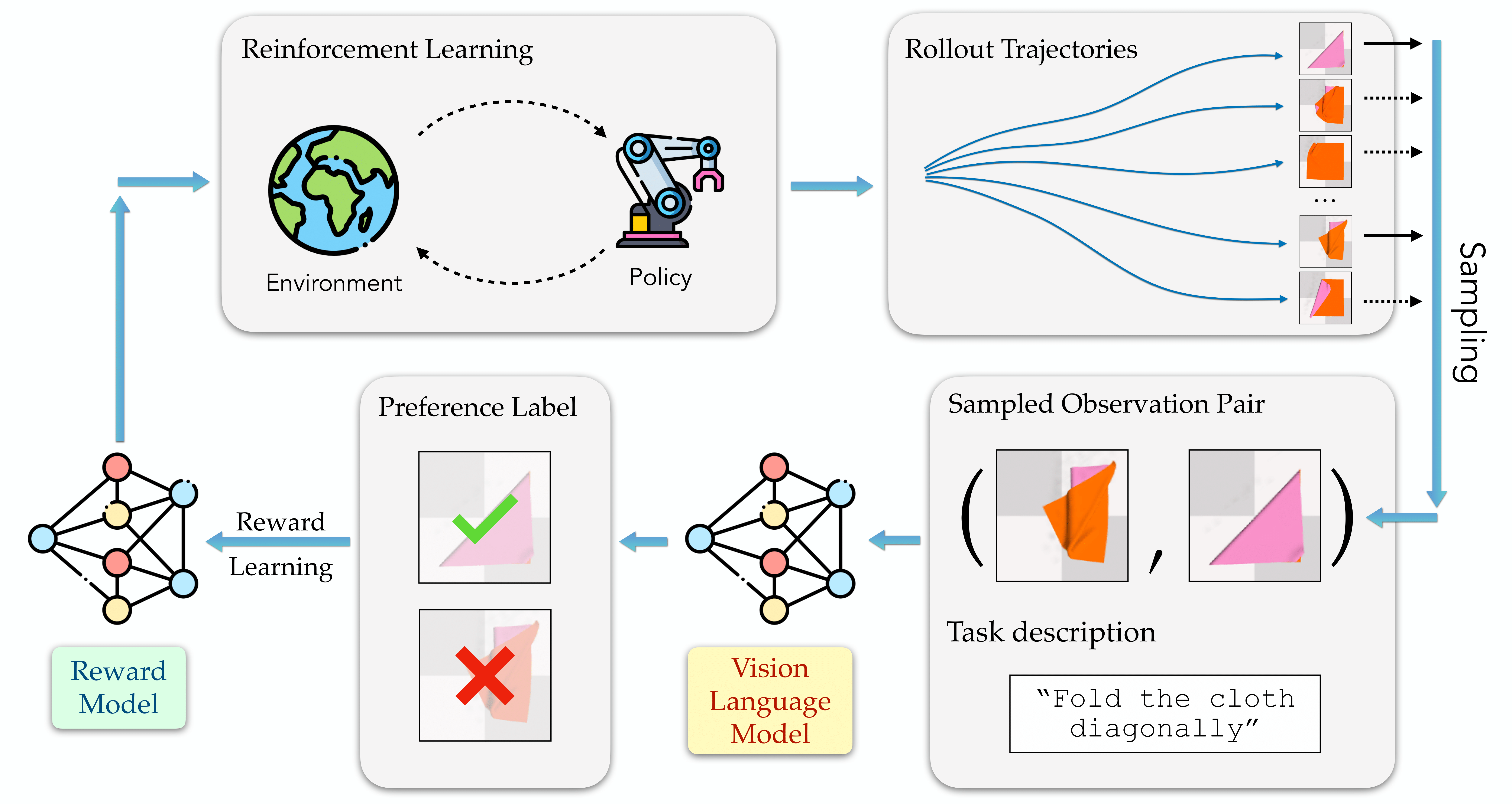
| RL-VLM-F: Reinforcement Learning from Vision Language Foundation Model Feedback Yufei Wang*, Zhanyi Sun*, Jesse Zhang, Zhou Xian, Erdem Bıyık, David Held†, Zackory Erickson† International Conference on Machine Learning (ICML), July 2024 * denotes equal contribution. † denotes equal advising. |
 |
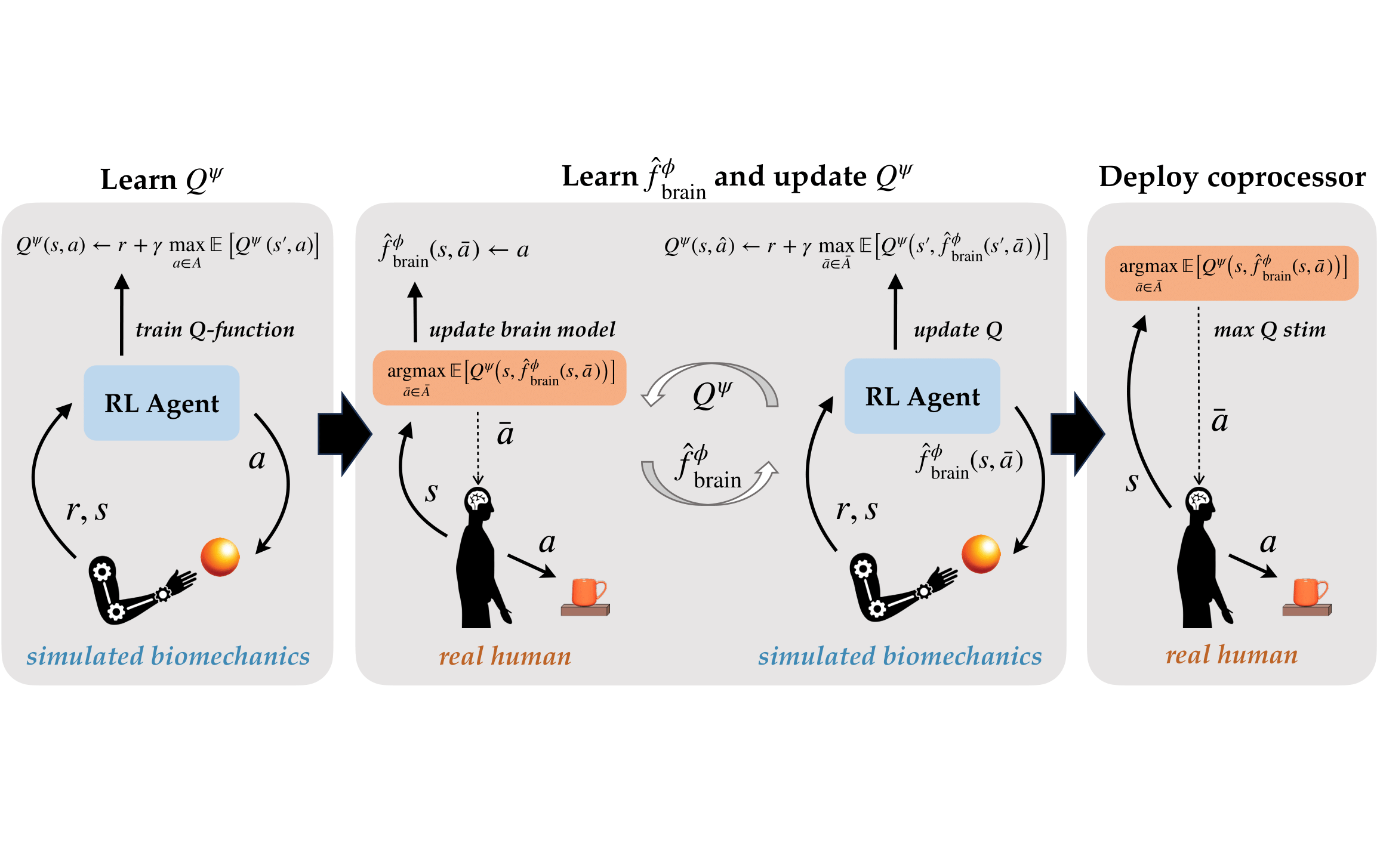
| Coprocessor Actor Critic: A Model-Based Reinforcement Learning Approach For Adaptive Brain Stimulation Michelle Pan*, Mariah Schrum*, Vivek Myers, Erdem Bıyık, Anca Dragan International Conference on Machine Learning (ICML), July 2024 * denotes equal contribution. |
 |
| Foundation Models for Embodied AI Sumedh Anand Sontakke CS Department, University of Southern California, May 2024 Ph.D. Dissertation |
|
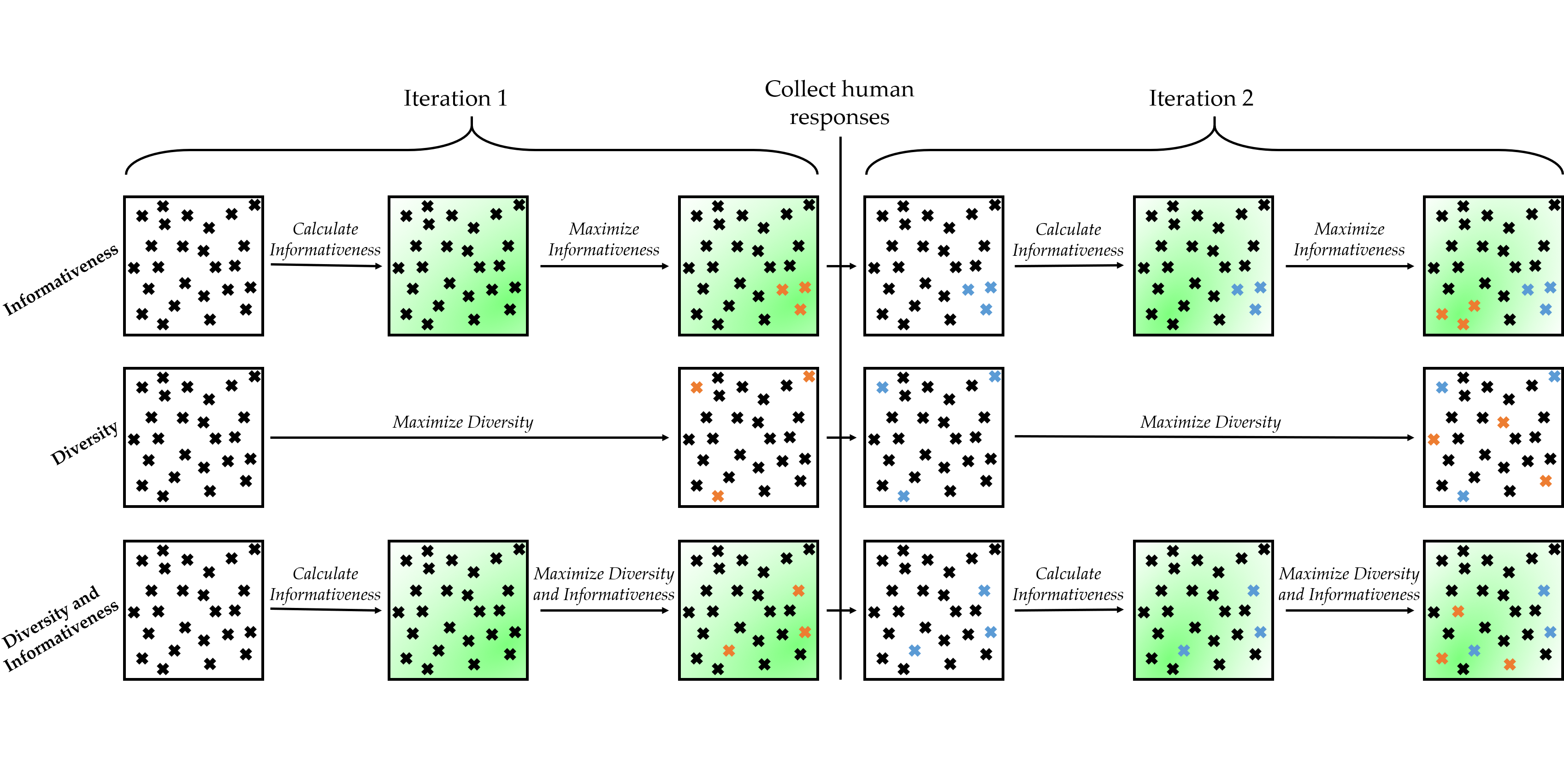
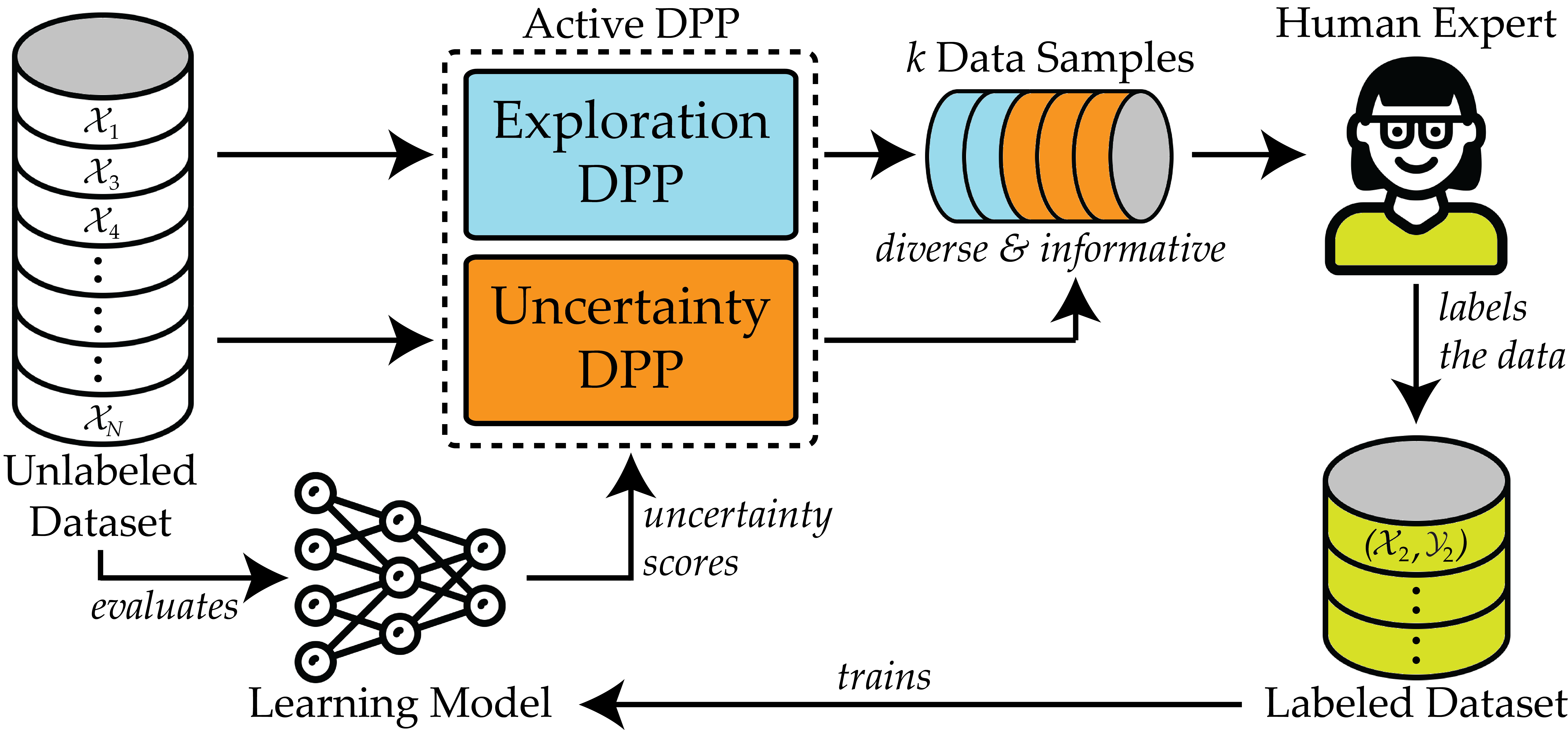
| Batch Active Learning of Reward Functions from Human Preferences Erdem Bıyık, Nima Anari, Dorsa Sadigh ACM Transactions on Human-Robot Interaction (THRI), 2024 |
 |
| A Generalized Acquisition Function for Preference-based Reward Learning Evan Ellis, Gaurav R. Ghosal, Stuart J. Russell, Anca Dragan, Erdem Bıyık International Conference on Robotics and Automation (ICRA), May 2024 |
|
| Active Preference-Based Gaussian Process Regression for Reward Learning and Optimization Erdem Bıyık, Nicolas Huynh, Mykel J. Kochenderfer, Dorsa Sadigh International Journal of Robotics Research (IJRR), 2024 |
 |
| Preference Elicitation with Soft Attributes in Interactive Recommendation Erdem Bıyık, Fan Yao, Yinlam Chow, Alex Haig, Chih-wei Hsu, Mohammad Ghavamzadeh, Craig Boutilier arXiv preprint, November 2023 |
|
| RoboCLIP: One Demonstration is Enough to Learn Robot Policies Sumedh A. Sontakke, Jesse Zhang, Sébastien M. R. Arnold, Karl Pertsch, Erdem Bıyık, Dorsa Sadigh, Chelsea Finn, Laurent Itti Conference on Neural Information Processing Systems (NeurIPS), December 2023 |
 |
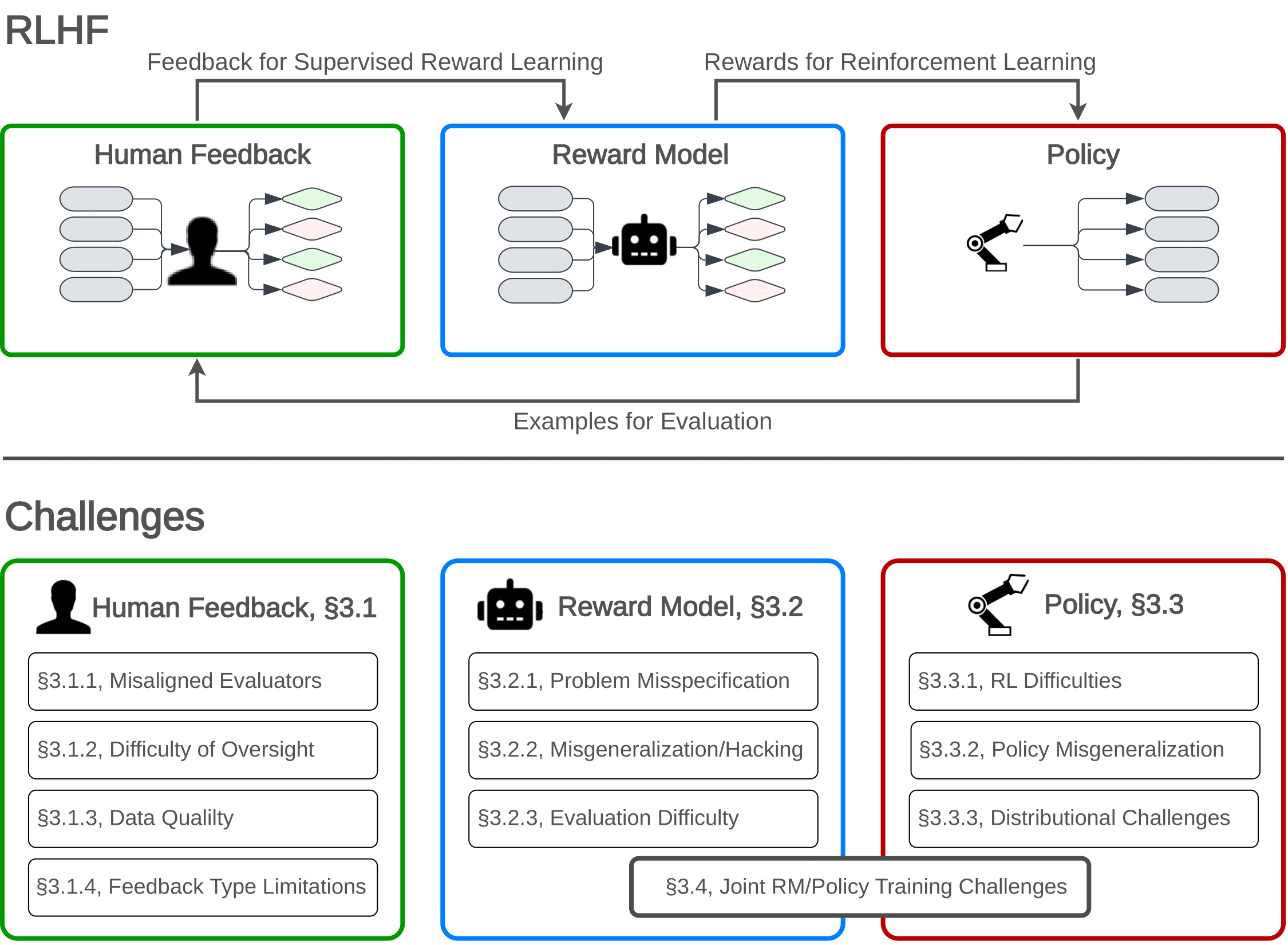
| Open Problems and Fundamental Limitations of Reinforcement Learning from Human Feedback Stephen Casper*, Xander Davies*, et al. Transactions on Machine Learning Research (TMLR), 2023 * denotes equal contribution. Outstanding paper finalist. |
 |
| Active Reward Learning from Online Preferences Vivek Myers, Erdem Bıyık, Dorsa Sadigh International Conference on Robotics and Automation (ICRA), May 2023 |
 |
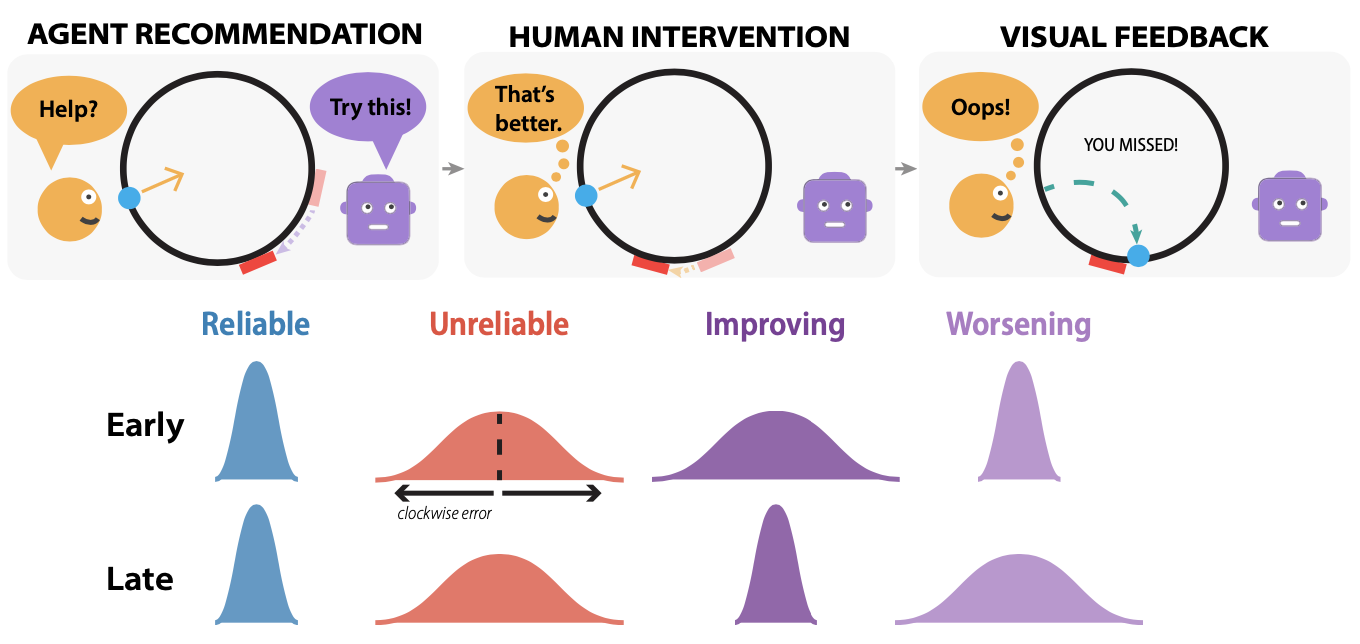
| Assistive Teaching of Motor Control Tasks to Humans Megha Srivastava, Erdem Bıyık, Suvir Mirchandani, Noah Goodman, Dorsa Sadigh Conference on Neural Information Processing Systems (NeurIPS), November 2022 |
 |
| How do People Incorporate Advice from Artificial Agents when Making Physical Judgments? Erik Brockbank*, Haoliang Wang*, Justin Yang, Suvir Mirchandani, Erdem Bıyık, Dorsa Sadigh, Judith Fan Cognitive Science Society Conference (CogSci), July 2022 * denotes equal contribution. Oral presentation. |
 |
| Learning Preferences For Interactive Autonomy Erdem Bıyık EE Department, Stanford University, May 2022 Ph.D. Dissertation |
 |
| Leveraging Smooth Attention Prior for Multi-Agent Trajectory Prediction Zhangjie Cao, Erdem Bıyık, Guy Rosman, Dorsa Sadigh International Conference on Robotics and Automation (ICRA), May 2022 |
 |
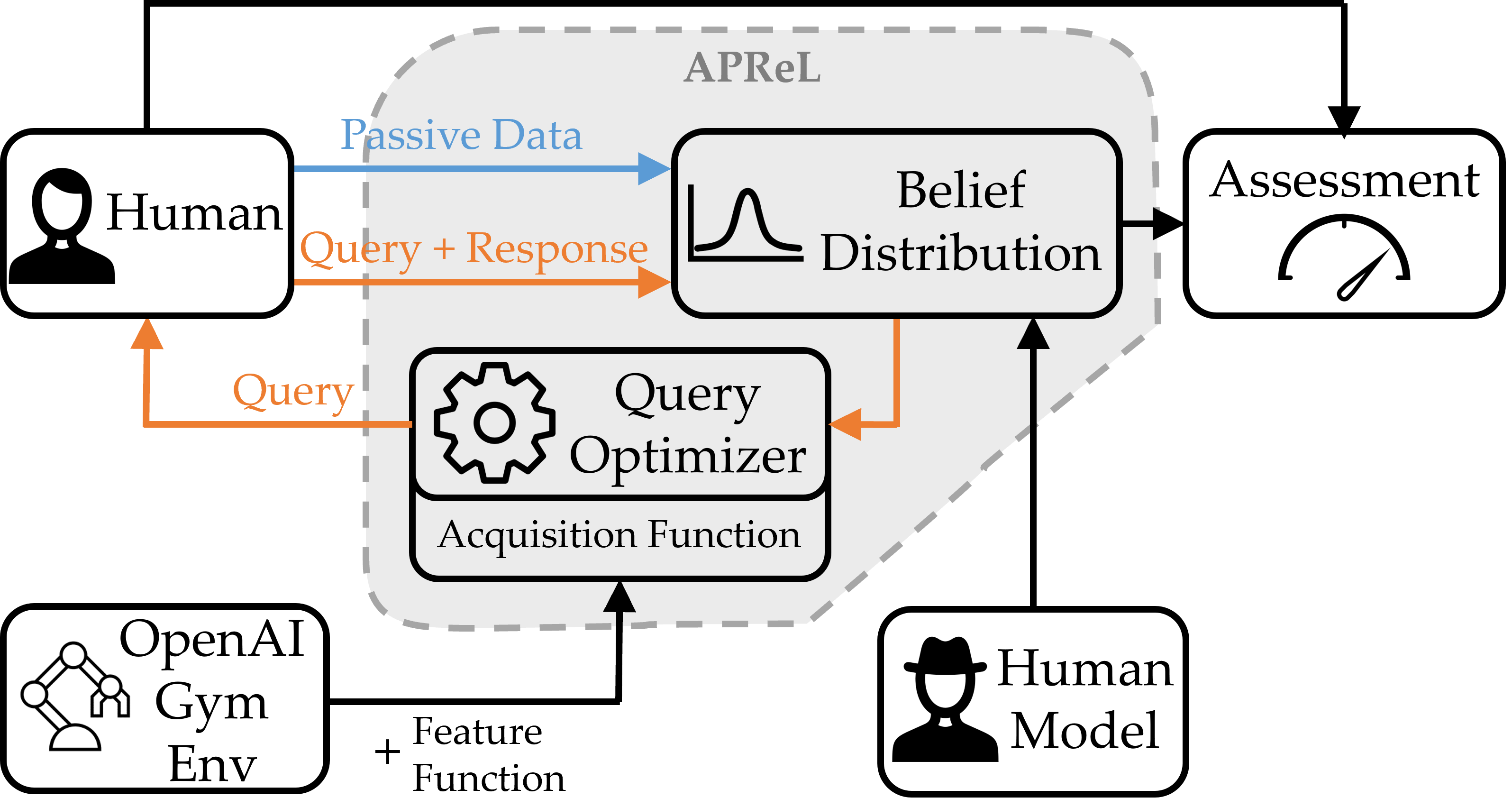
| APReL: A Library for Active Preference-based Reward Learning Algorithms Erdem Bıyık, Aditi Talati, Dorsa Sadigh 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), March 2022 Also presented at Artificial Intelligence for Human-Robot Interaction (AI-HRI) at AAAI Fall Symposium Series, November 2021 (PDF). |
 |
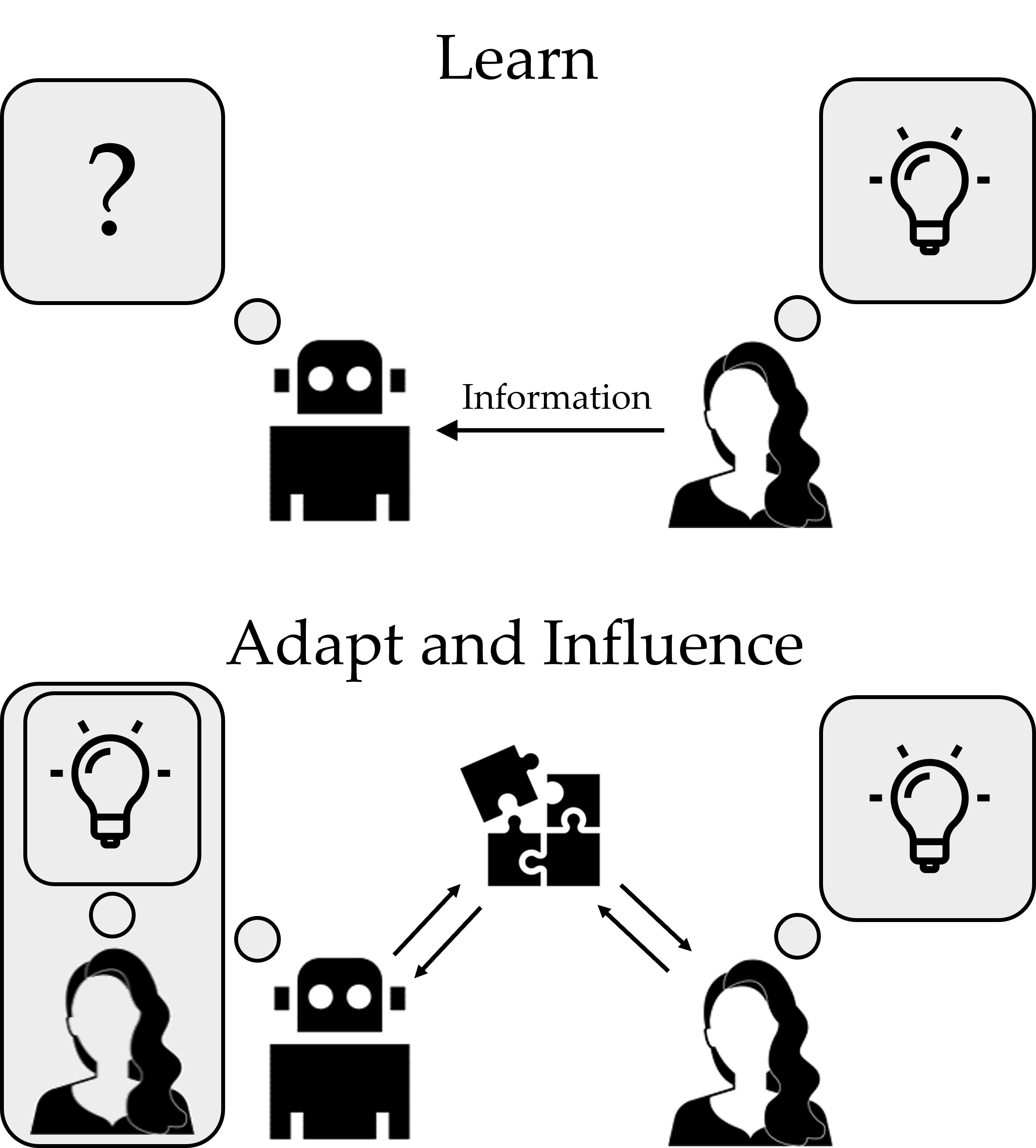
| Learning from Humans for Adaptive Interaction Erdem Bıyık The 17th Annual Human-Robot Interaction Pioneers Workshop (HRI Pioneers), March 2022 |
 |
| Partner-Aware Algorithms in Decentralized Cooperative Bandit Teams Erdem Bıyık, Anusha Lalitha, Rajarshi Saha, Andrea Goldsmith, Dorsa Sadigh Proceedings of the 36th AAAI Conference on Artificial Intelligence, February 2022 Also presented at Artificial Intelligence for Human-Robot Interaction (AI-HRI) at AAAI Fall Symposium Series, November 2021 (PDF). Oral presentation. |
 |
| Learning Multimodal Rewards from Rankings Vivek Myers, Erdem Bıyık, Nima Anari, Dorsa Sadigh Proceedings of the 5th Conference on Robot Learning (CoRL), November 2021 Oral presentation. |
 |
| Learning Reward Functions from Scale Feedback Nils Wilde*, Erdem Bıyık*, Dorsa Sadigh, Stephen L. Smith Proceedings of the 5th Conference on Robot Learning (CoRL), November 2021 * denotes equal contribution. |
 |
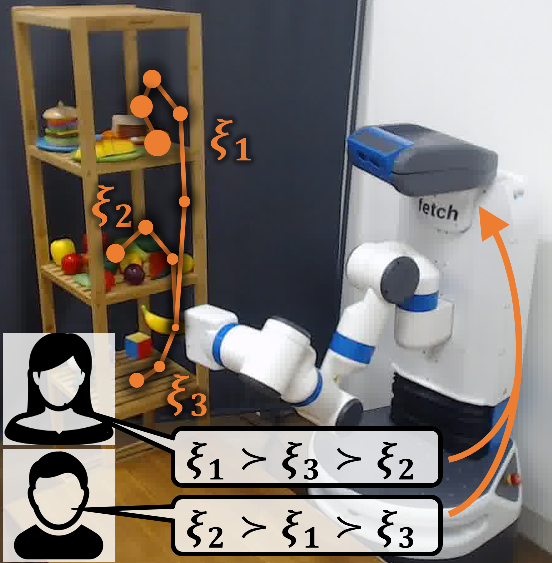
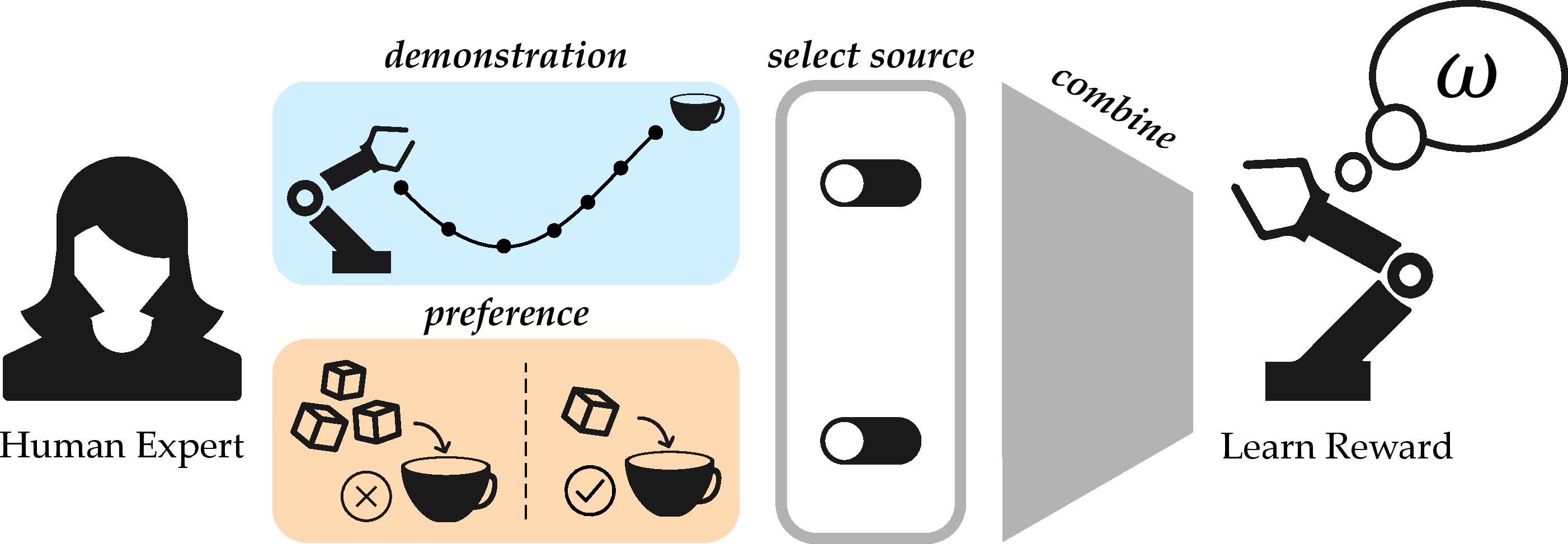
| Learning Reward Functions from Diverse Sources of Human Feedback: Optimally Integrating Demonstrations and Preferences Erdem Bıyık, Dylan P. Losey, Malayandi Palan, Nicholas C. Landolfi, Gleb Shevchuk, Dorsa Sadigh The International Journal of Robotics Research (IJRR), 2021 |
 |
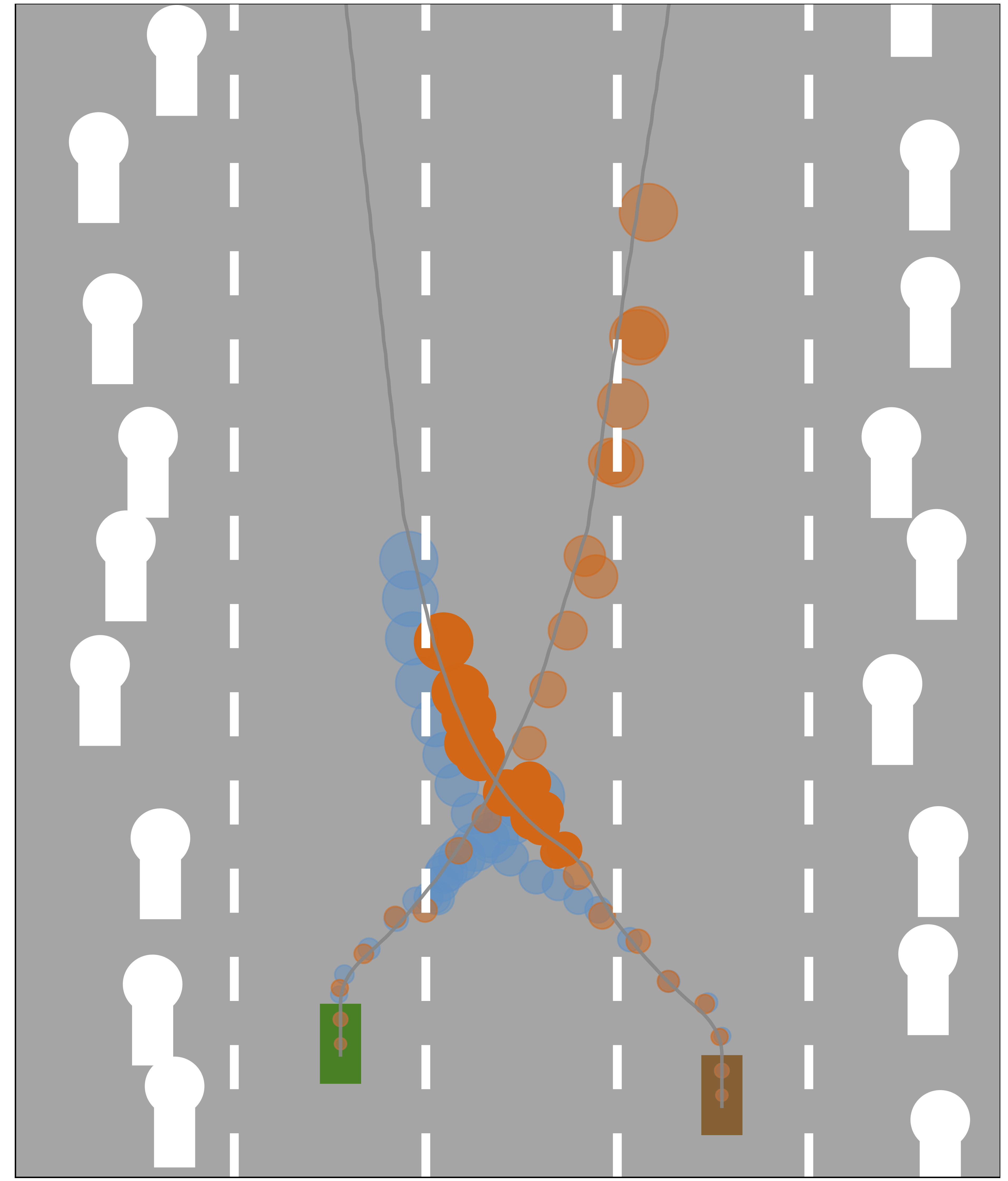
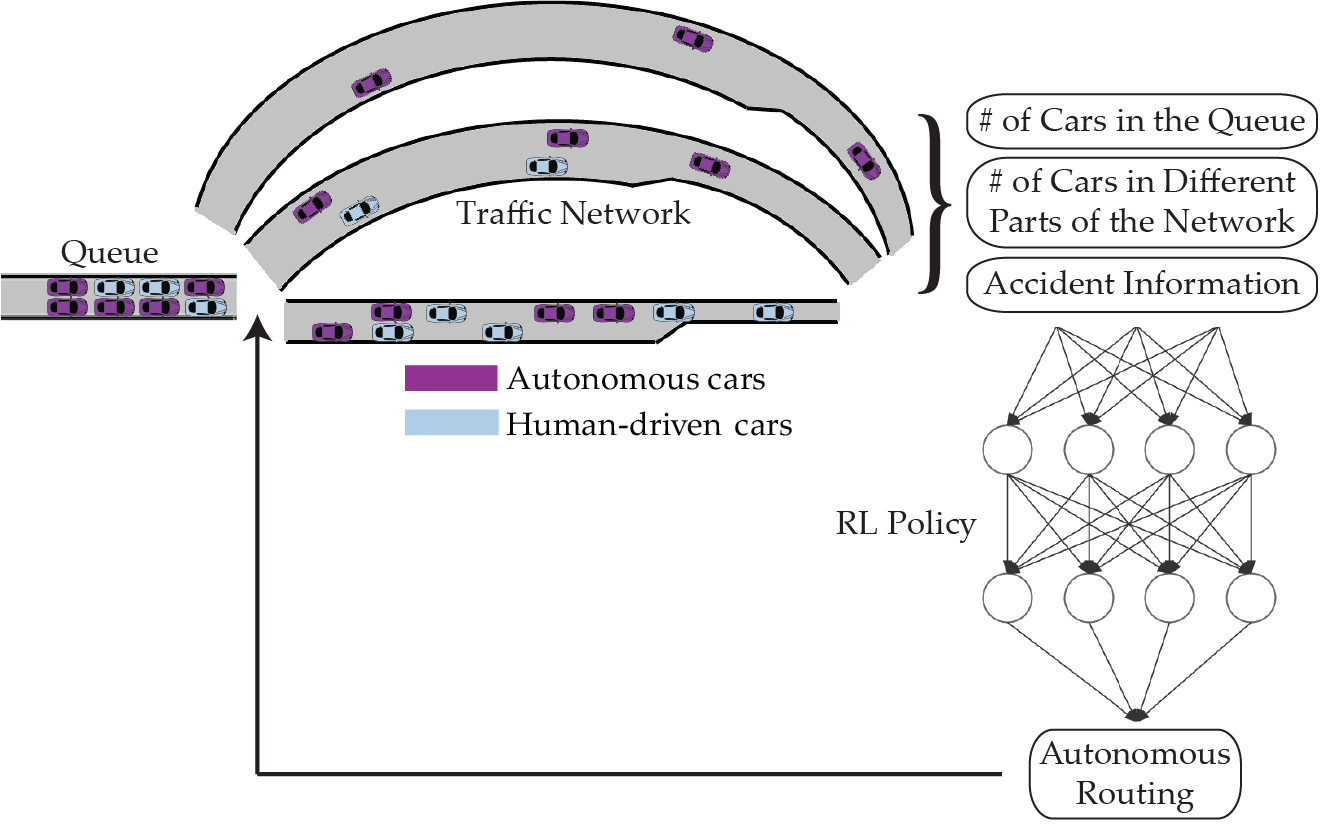
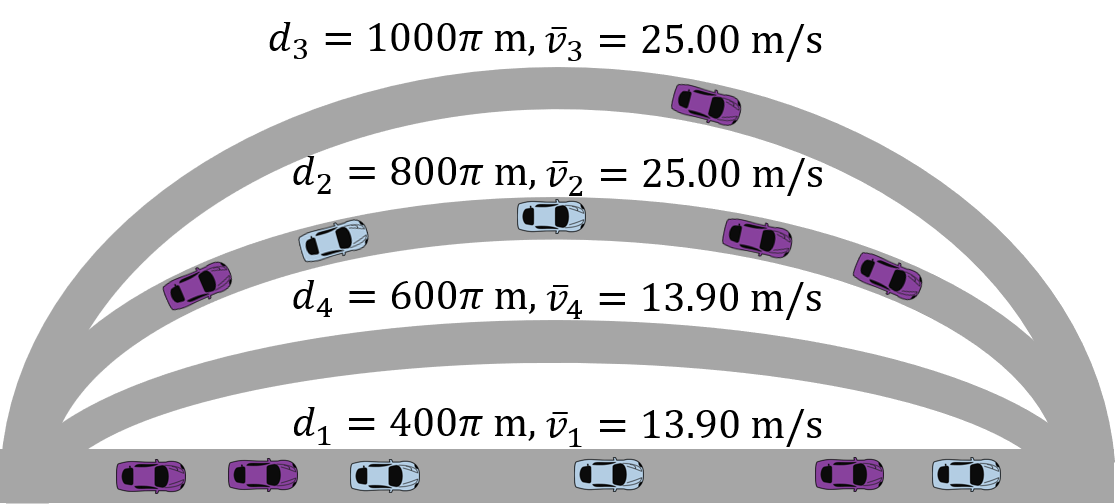
| Learning How to Dynamically Route Autonomous Vehicles on Shared Roads Daniel A. Lazar*, Erdem Bıyık*, Dorsa Sadigh, Ramtin Pedarsani Transportation Research Part C: Emerging Technologies (TR_C), September 2021 * denotes equal contribution. |
 |
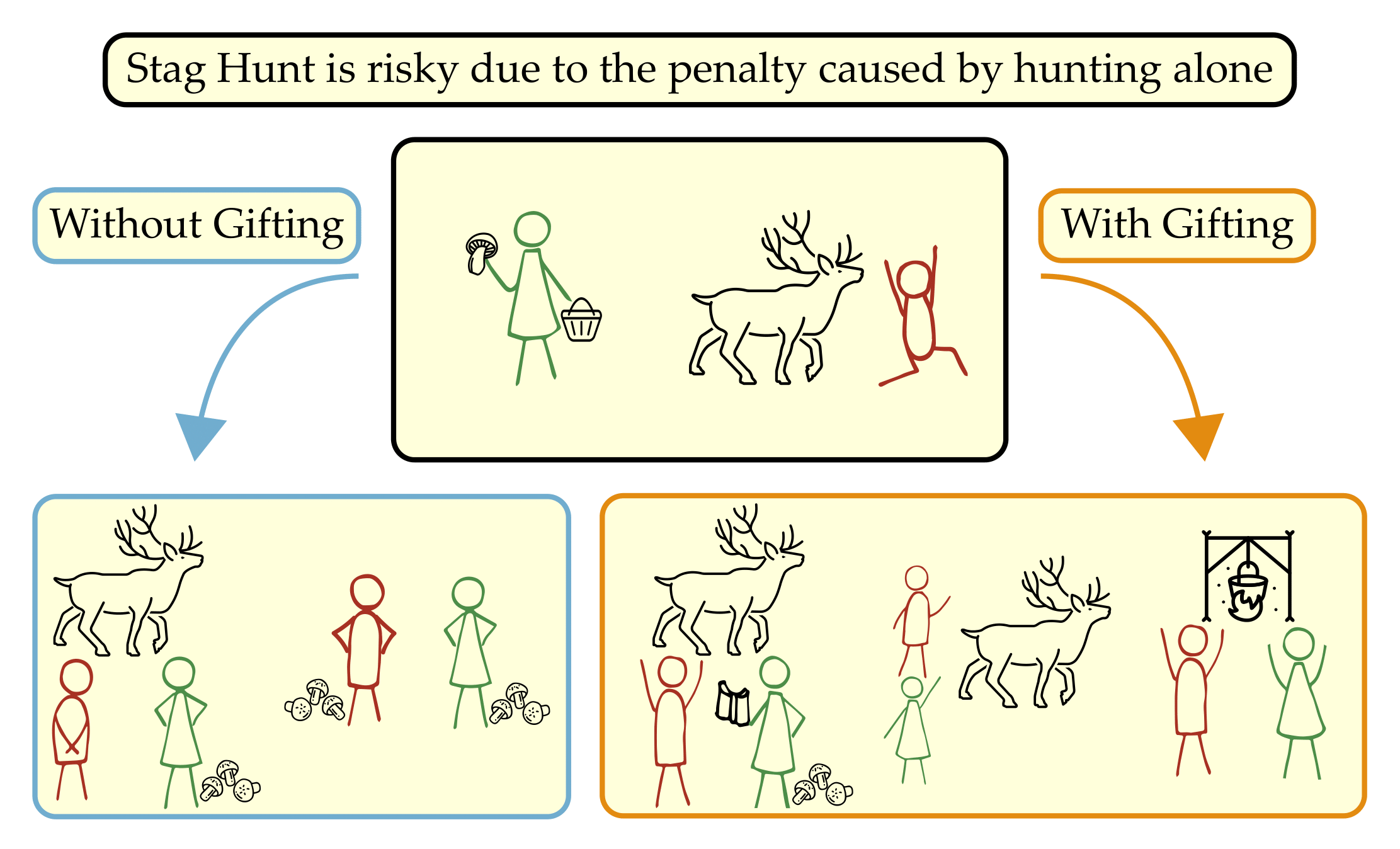
| Emergent Prosociality in Multi-Agent Games Through Gifting Woodrow Z. Wang*, Mark Beliaev*, Erdem Bıyık*, Daniel A. Lazar, Ramtin Pedarsani, Dorsa Sadigh 30th International Joint Conference on Artificial Intelligence (IJCAI), August 2021 * denotes equal contribution. |
 |
| Incentivizing Efficient Equilibria in Traffic Networks with Mixed Autonomy Erdem Bıyık*, Daniel A. Lazar*, Ramtin Pedarsani, Dorsa Sadigh IEEE Transactions on Control of Network Systems (TCNS), 2021 * denotes equal contribution. |
 |
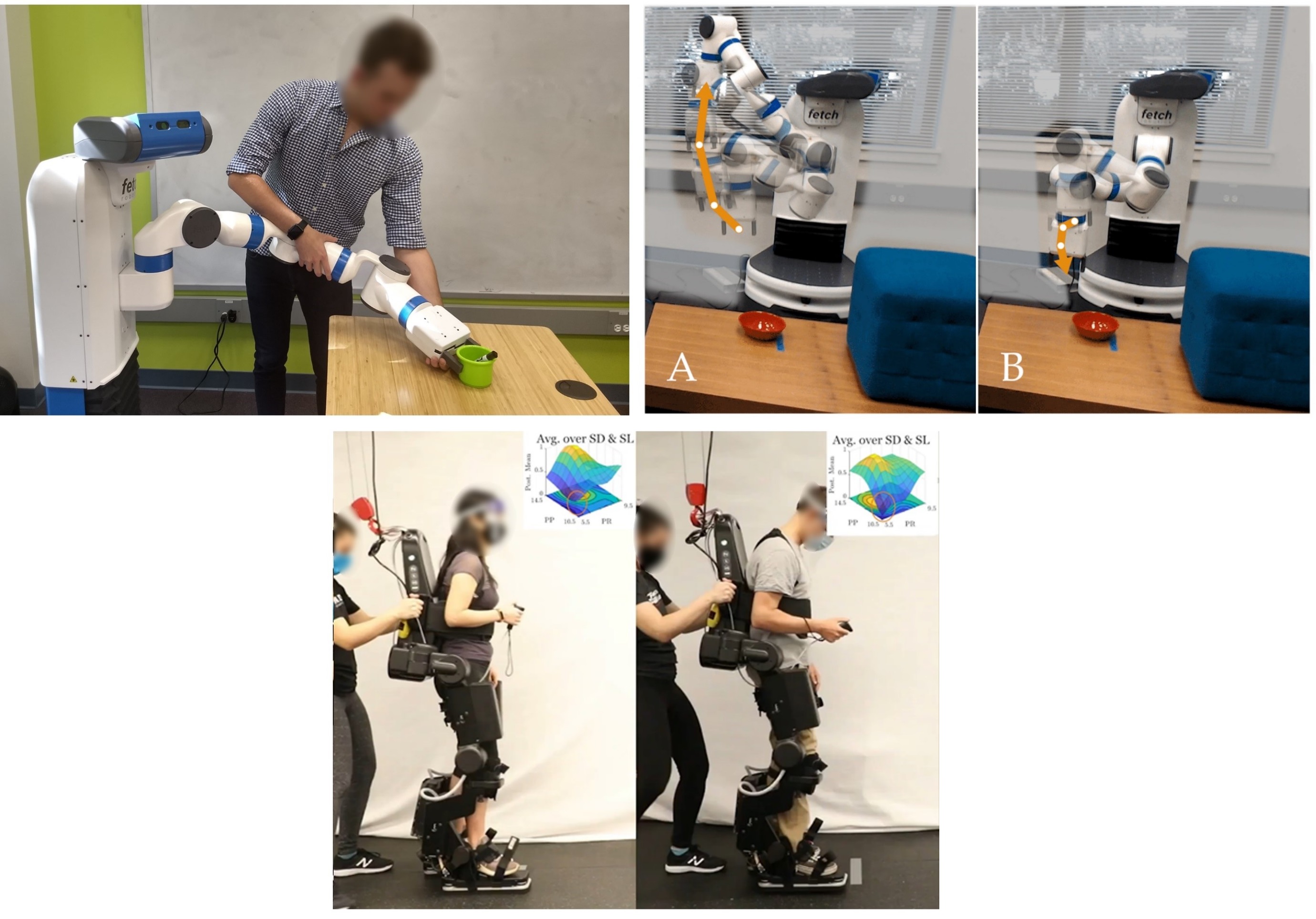
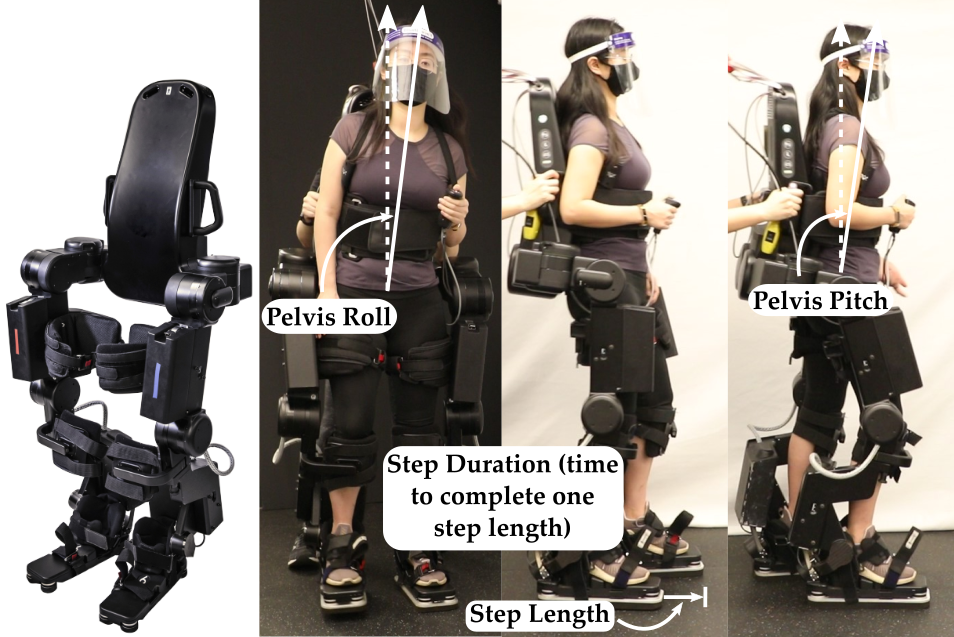
| ROIAL: Region of Interest Active Learning for Characterizing Exoskeleton Gait Preference Landscapes Kejun Li, Maegan Tucker, Erdem Bıyık, Ellen Novoseller, Joel W. Burdick, Yanan Sui, Dorsa Sadigh, Yisong Yue, Aaron D. Ames International Conference on Robotics and Automation (ICRA), May 2021 |
 |
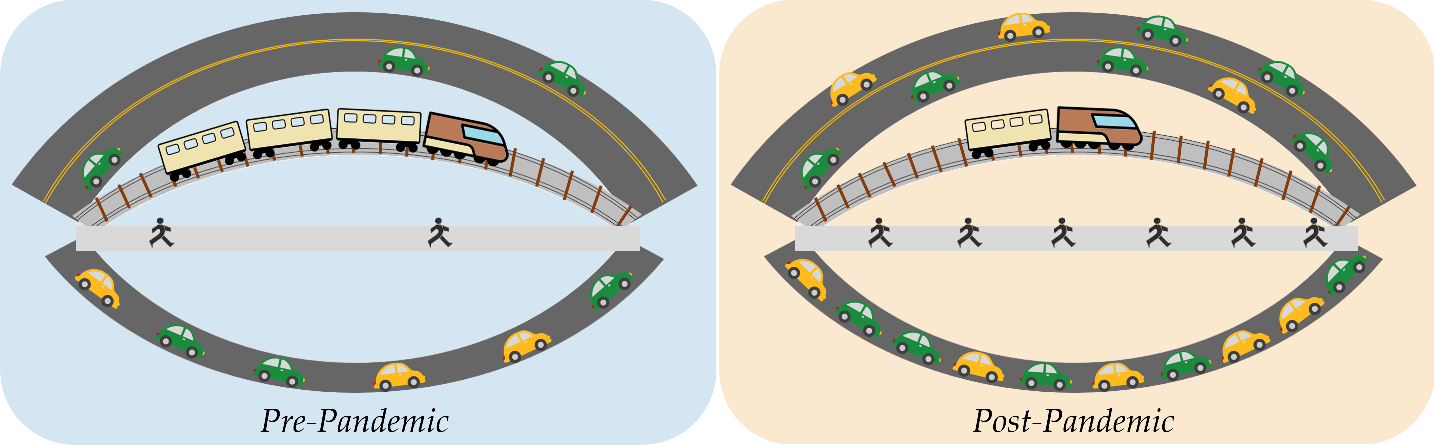
| Incentivizing Routing Choices for Safe and Efficient Transportation in the Face of the COVID-19 Pandemic Mark Beliaev, Erdem Bıyık, Daniel A. Lazar, Woodrow Z. Wang, Dorsa Sadigh, Ramtin Pedarsani 12th ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), May 2021 |
 |
| Preference-based learning of reward function features Sydney M Katz*, Amir Maleki*, Erdem Bıyık, Mykel J Kochenderfer arXiv preprint, March 2021 * denotes equal contribution. |
 |
| Multi-Agent Safe Planning with Gaussian Processes Zheqing Zhu, Erdem Bıyık, Dorsa Sadigh Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2020 |
 |
| Active Preference-Based Gaussian Process Regression for Reward Learning Erdem Bıyık*, Nicolas Huynh*, Mykel J. Kochenderfer, Dorsa Sadigh Proceedings of Robotics: Science and Systems (RSS), July 2020 * denotes equal contribution. |
|
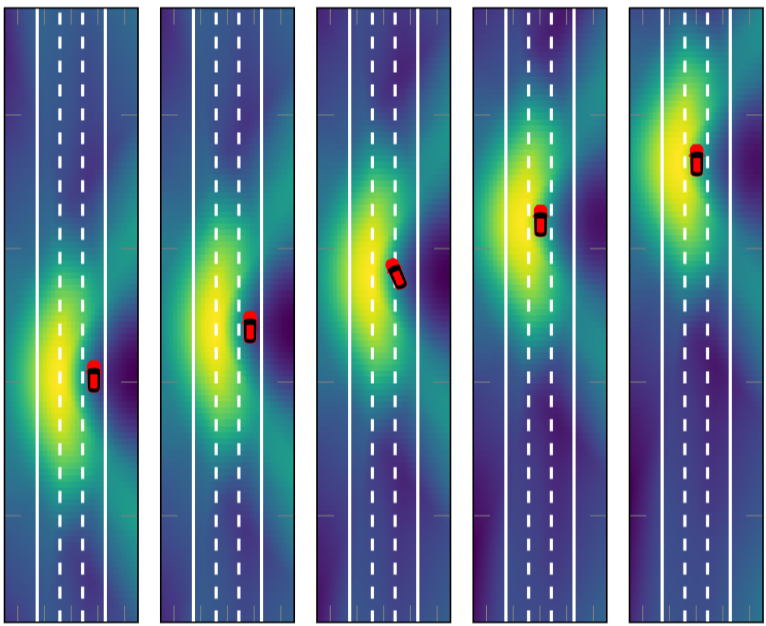
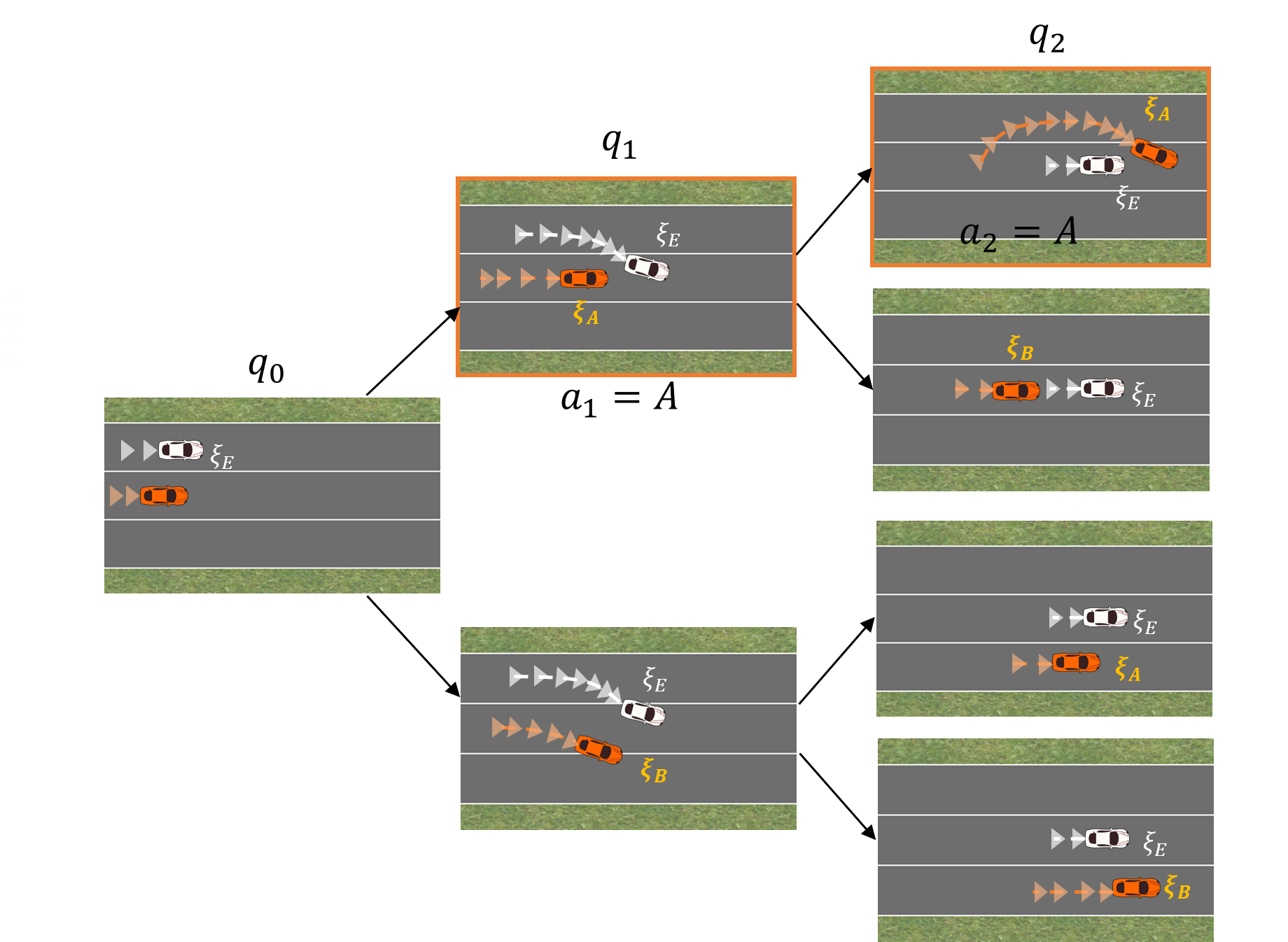
| Reinforcement Learning based Control of Imitative Policies for Near-Accident Driving Zhangjie Cao*, Erdem Bıyık*, Woodrow Z. Wang, Allan Raventos, Adrien Gaidon, Guy Rosman, Dorsa Sadigh Proceedings of Robotics: Science and Systems (RSS), July 2020 * denotes equal contribution. |
 |
| Emergent Correlated Equilibrium through Synchronized Exploration Mark Beliaev*, Woodrow Z. Wang*, Daniel A. Lazar, Erdem Bıyık, Dorsa Sadigh, Ramtin Pedarsani RSS 2020 Workshop on Emergent Behaviors in Human-Robot Systems, July 2020 |
|
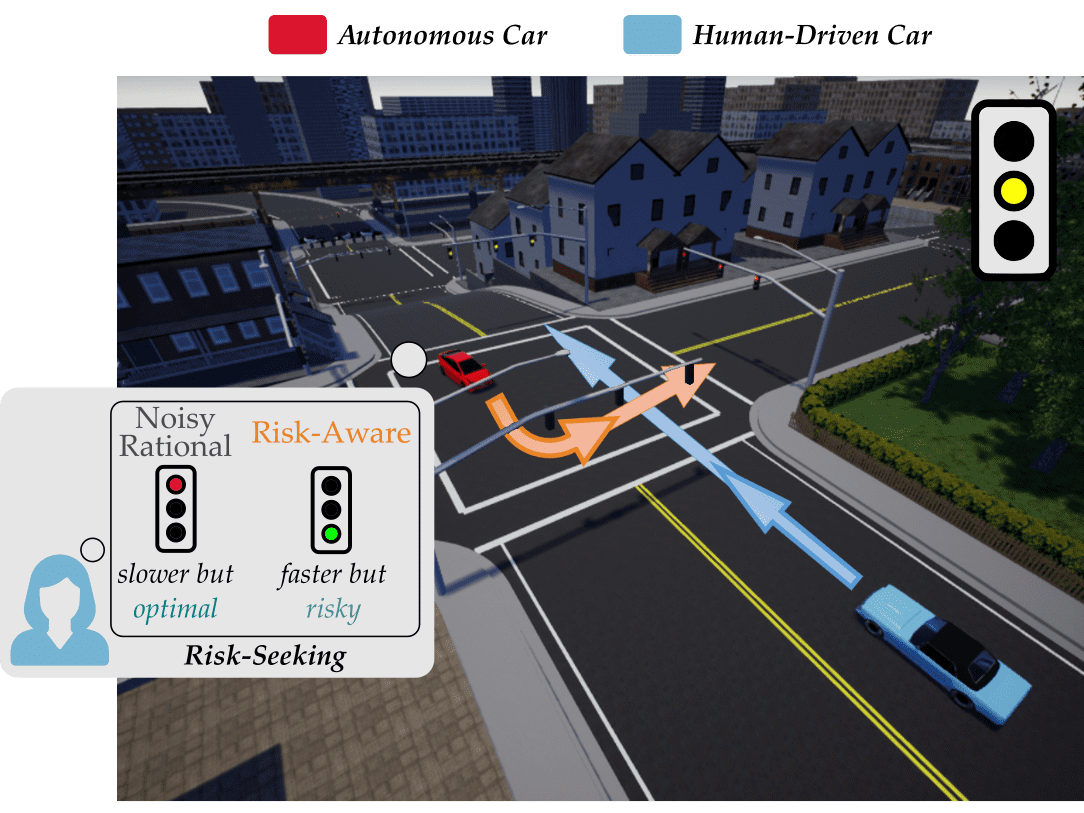
| When Humans Aren't Optimal: Robots that Collaborate with Risk-Aware Humans Minae Kwon, Erdem Bıyık, Aditi Talati, Karan Bhasin, Dylan P. Losey, Dorsa Sadigh ACM/IEEE International Conference on Human-Robot Interaction (HRI), March 2020 Also presented at Cooperative AI NeurIPS Workshop 2021, December 2021 (PDF). Honorable mention award. |
 |
| The Green Choice: Learning and Influencing Human Decisions on Shared Roads Erdem Bıyık, Daniel A. Lazar, Dorsa Sadigh, Ramtin Pedarsani Proceedings of the 58th IEEE Conference on Decision and Control (CDC), December 2019 |
 |
| Active Learning of Reward Dynamics from Hierarchical Queries Chandrayee Basu, Erdem Bıyık, Zhixun He, Mukesh Singhal, Dorsa Sadigh Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 2019 |
 |
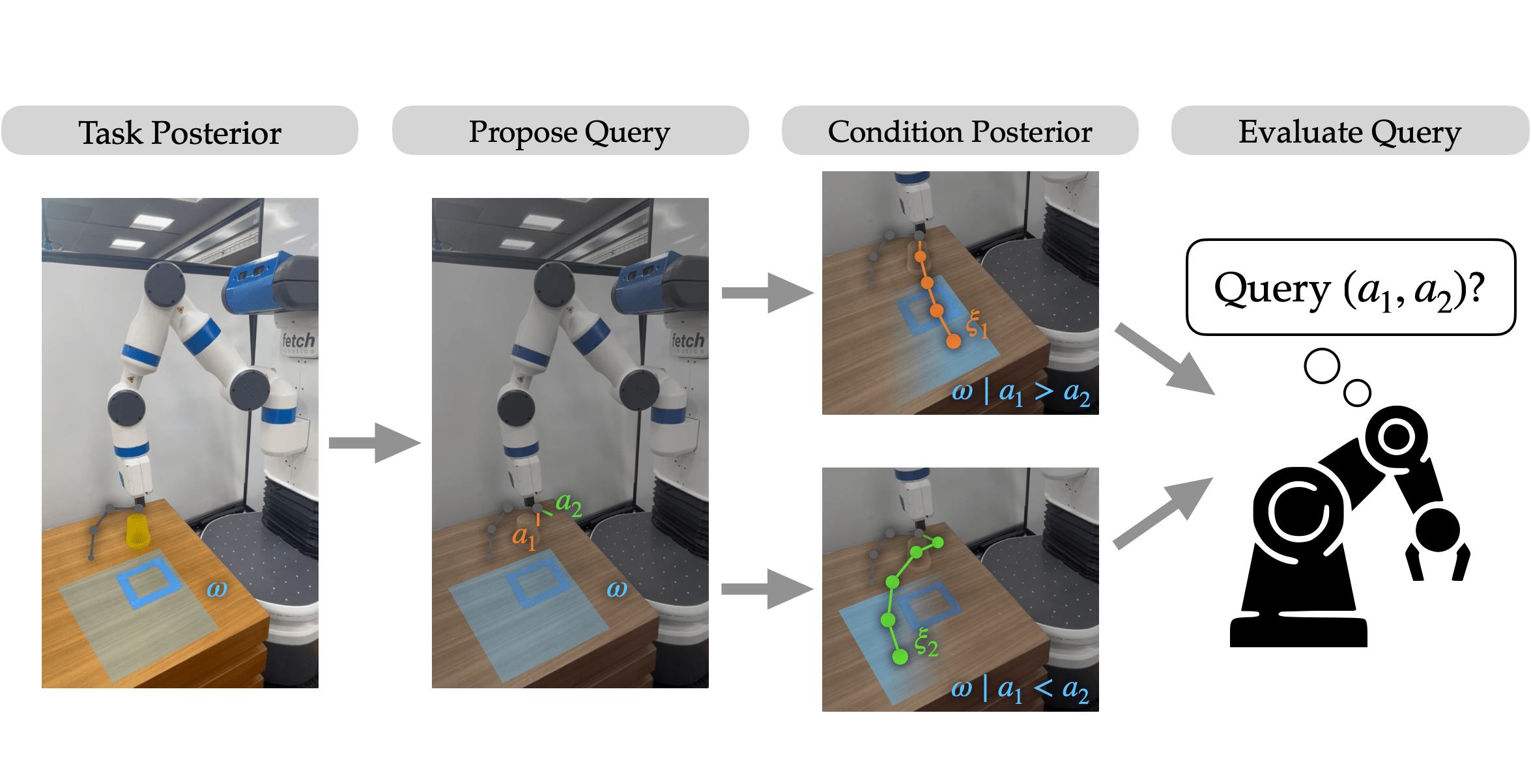
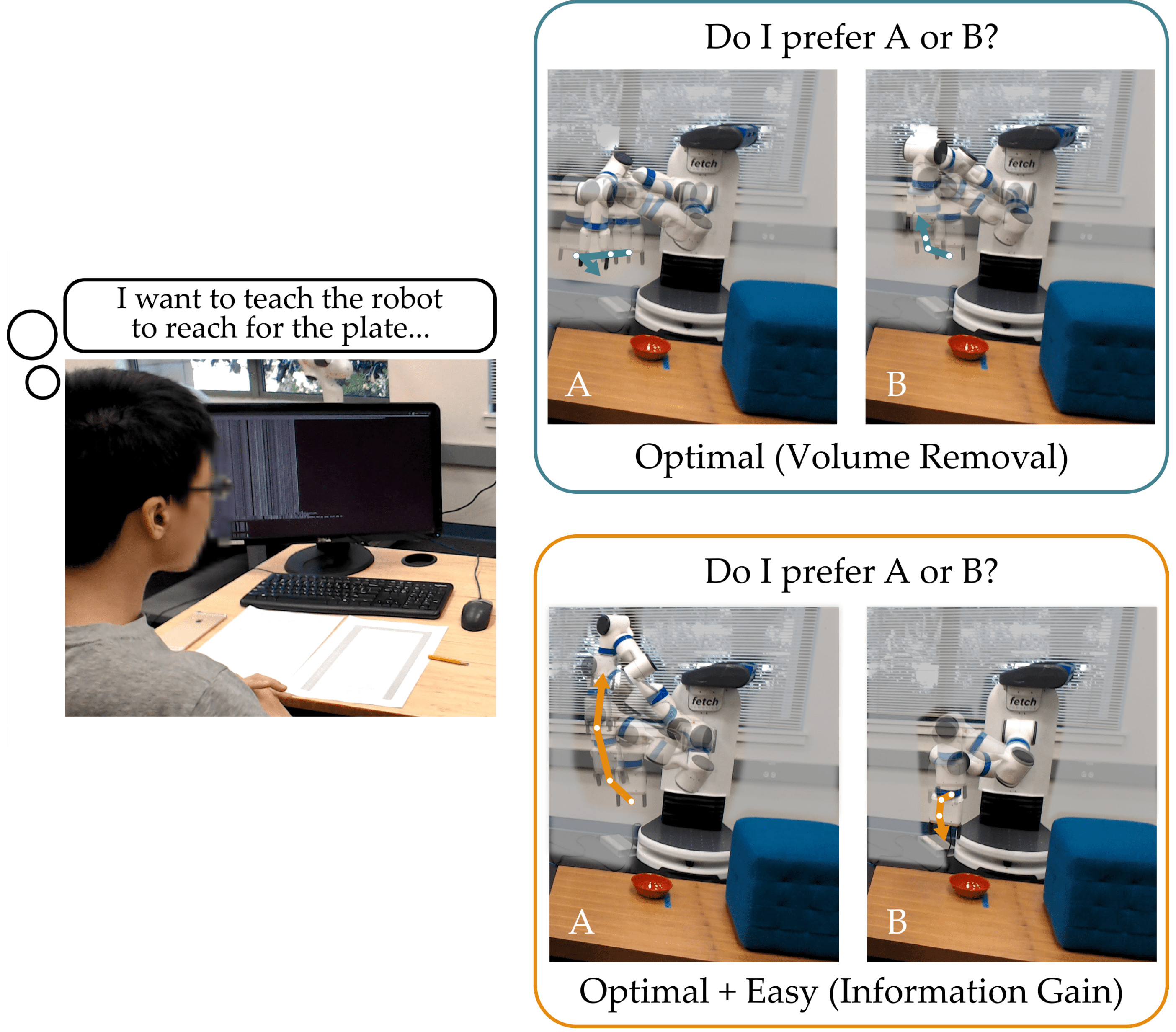
| Asking Easy Questions: A User-Friendly Approach to Active Reward Learning Erdem Bıyık, Malayandi Palan, Nicholas C. Landolfi, Dylan P. Losey, Dorsa Sadigh Proceedings of the 3rd Conference on Robot Learning (CoRL), October 2019 |
 |
| Efficient and Safe Exploration in Deterministic Markov Decision Processes with Unknown Transition Models Erdem Bıyık*, Jonathan Margoliash*, Shahrouz R. Alimo, Dorsa Sadigh Proceedings of the American Control Conference (ACC), July 2019 * denotes equal contribution. |
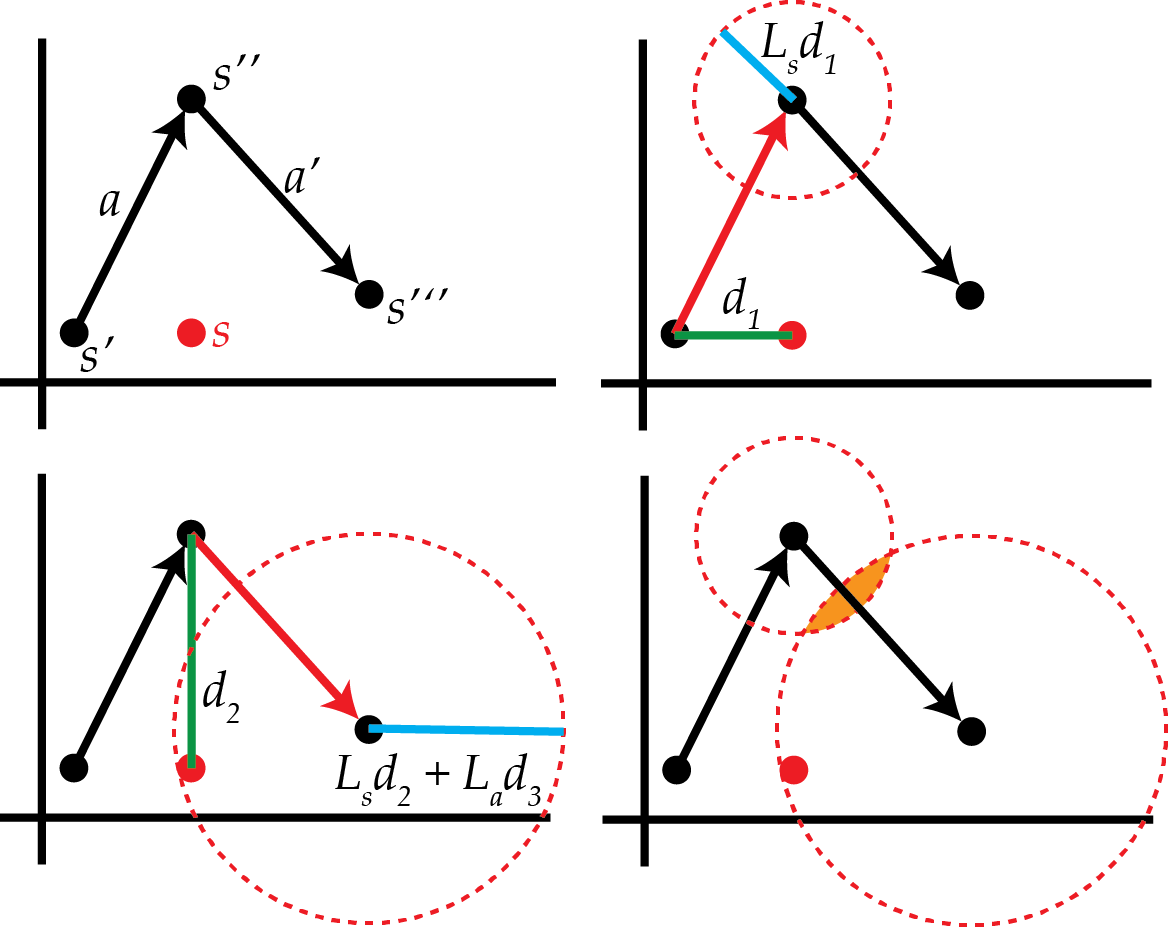 |
| Batch Active Learning Using Determinantal Point Processes Erdem Bıyık, Kenneth Wang, Nima Anari, Dorsa Sadigh arXiv preprint, June 2019 |
 |
| Altruistic Autonomy: Beating Congestion on Shared Roads Erdem Bıyık*, Daniel A. Lazar*, Ramtin Pedarsani, Dorsa Sadigh Proceedings of the 13th International Workshop on Algorithmic Foundations of Robotics (WAFR), December 2018 * denotes equal contribution. |
 |
| Batch Active Preference-Based Learning of Reward Functions Erdem Bıyık, Dorsa Sadigh Proceedings of the 2nd Conference on Robot Learning (CoRL), October 2018 Oral presentation. |
 |
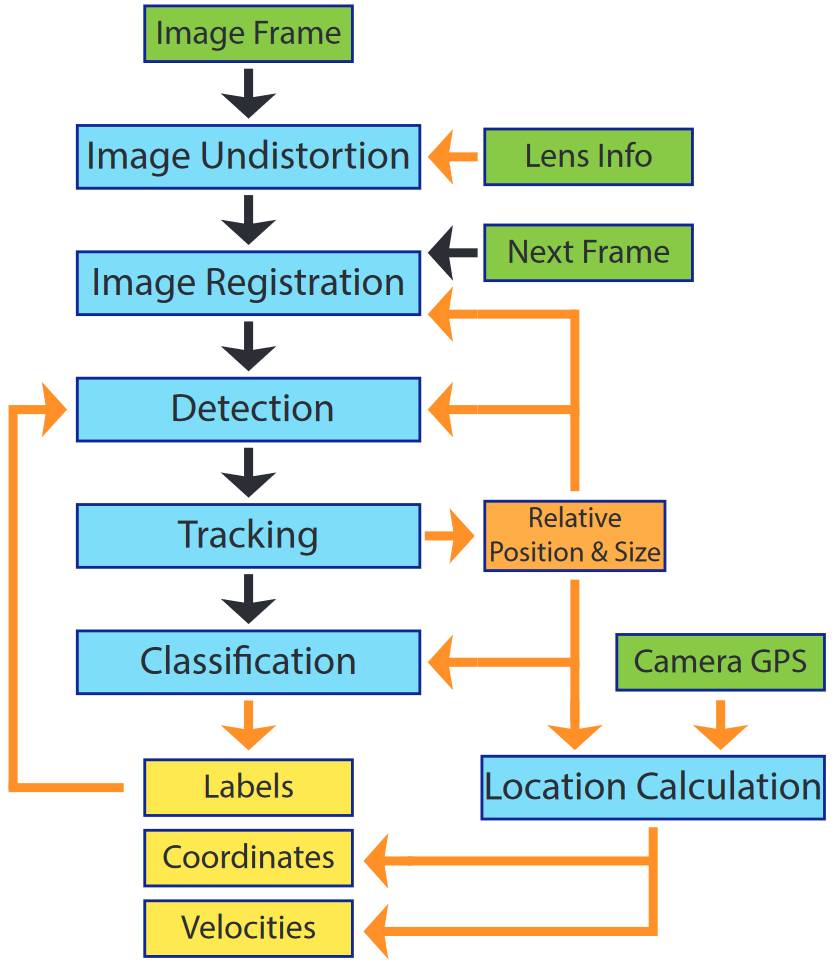
| Real-Time Detection, Tracking and Classification of Multiple Moving Objects in UAV Videos Hüseyin C. Baykara*, Erdem Bıyık*, Gamze Gül*, Deniz Onural*, Ahmet S. Öztürk*, İlkay Yıldız* International Conference on Tools with Artificial Intelligence (ICTAI), November 2017 * denotes equal contribution. |
 |